V tomto příspěvku budeme konstruovat 10kanálový přepínač dálkového ovládání založený na pásmu ISM (průmyslové, vědecké a lékařské).
Úvod
The Pásmo ISM je provozován na frekvenci 2,4 GHz, kterou lze používat bez licencí s přiměřeným výkonem.
Navrhovaným projektem je bezdrátový vypínač pro všeobecné použití ON / OFF, který lze použít k zapnutí / vypnutí světel, ventilátorů, domácích spotřebičů do domácí automatizace, pokud jsou dostatečně jistí, aby do tohoto projektu přinesli úpravy hardwaru nebo softwaru.
Projekt je rozdělen na dvě části: dálkový ovladač a přijímač.
Dálkový ovladač:
Dálkový ovladač se skládá z 10 tlačítek pro ovládání 10 jednotlivých relé na přijímači. Dálkový ovladač je napájen 9V baterií, díky níž je přenosný.
Srdcem projektu je modul 2,4 GHz transceiveru NRF24L01, který umožňuje komunikaci mezi dvěma Arduiny.
Dálkový ovladač má potvrzovací LED.
Potvrzovací LED se na okamžik rozsvítí pokaždé, když stiskneme tlačítko na dálkovém ovladači, a to pouze v případě, že přijímač přijme vysílaný signál a poté přijímač vyšle zpětnovazební signál zpět do dálkového ovladače, aby spustil LED.
Tento proces zajistí, aby byl příkaz ON / OFF dálkového ovladače dosažen do cíle pomocí vizuálního potvrzení.
V obvodu dálkového ovladače je k dispozici vypínač ZAP / VYP, který zabrání ztrátě nadměrné energie při nečinnosti.
Pro konstrukci dálkového ovladače se doporučuje Arduino Nano nebo Arduino Pro-mini, protože je v menším provedení, díky kterému je přenosný.
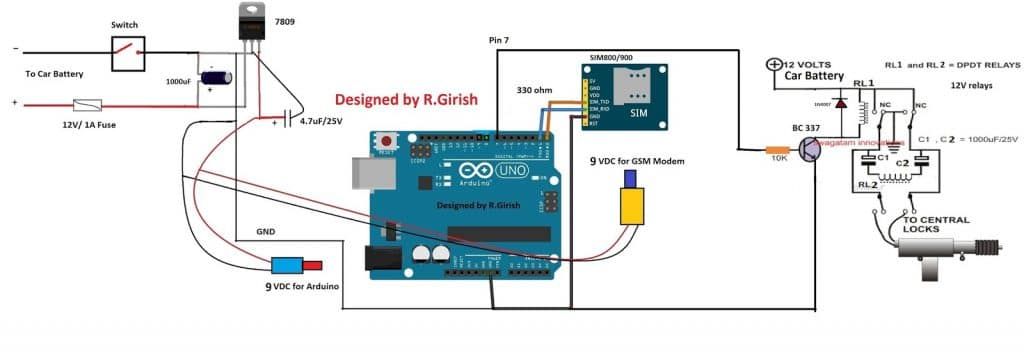
Kruhový diagram:

Výše uvedené je kompletní schéma zapojení dálkového ovladače. Schéma připojení kolíků pro NRF24L01 je také uvedeno ve stejném schématu.
Až budete hotovi, dálkový ovladač vypněte.
Stáhněte si soubor knihovny zde: github.com/nRF24/RF24.git
Program pro dálkové ovládání:
//-----Program Developed by R.Girish----//
#include
#include
RF24 radio(9,10)
const byte address[][6] = {'00001', '00002'}
const int ip1 = 2
const int ip2 = 3
const int ip3 = 4
const int ip4 = 5
const int ip5 = 6
const int ip6 = 7
const int ip7 = 8
const int ip8 = A0
const int ip9 = A1
const int ip10 = A2
const int buzzer = A3
char buzzchar[32] = ''
const char constbuzzer[32] = 'buzz'
const char button1[32] = 'activate_1'
const char button2[32] = 'activate_2'
const char button3[32] = 'activate_3'
const char button4[32] = 'activate_4'
const char button5[32] = 'activate_5'
const char button6[32] = 'activate_6'
const char button7[32] = 'activate_7'
const char button8[32] = 'activate_8'
const char button9[32] = 'activate_9'
const char button10[32] = 'activate_10'
void setup()
{
pinMode(ip1, INPUT)
pinMode(ip2, INPUT)
pinMode(ip3, INPUT)
pinMode(ip4, INPUT)
pinMode(ip5, INPUT)
pinMode(ip6, INPUT)
pinMode(ip7, INPUT)
pinMode(ip8, INPUT)
pinMode(ip9, INPUT)
pinMode(ip10, INPUT)
pinMode(buzzer, OUTPUT)
digitalWrite(ip1, HIGH)
digitalWrite(ip2, HIGH)
digitalWrite(ip3, HIGH)
digitalWrite(ip4, HIGH)
digitalWrite(ip5, HIGH)
digitalWrite(ip6, HIGH)
digitalWrite(ip7, HIGH)
digitalWrite(ip8, HIGH)
digitalWrite(ip9, HIGH)
digitalWrite(ip10, HIGH)
radio.begin()
radio.openWritingPipe(address[1])
radio.openReadingPipe(1, address[0])
radio.setChannel(100)
radio.setDataRate(RF24_250KBPS)
radio.setPALevel(RF24_PA_MAX)
radio.stopListening()
}
void loop()
{
if(digitalRead(ip1) == LOW)
{
radio.write(&button1, sizeof(button1))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip2) == LOW)
{
radio.write(&button2, sizeof(button2))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip3) == LOW)
{
radio.write(&button3, sizeof(button3))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip4) == LOW)
{
radio.write(&button4, sizeof(button4))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip5) == LOW)
{
radio.write(&button5, sizeof(button5))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip6) == LOW)
{
radio.write(&button6, sizeof(button6))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip7) == LOW)
{
radio.write(&button7, sizeof(button7))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip8) == LOW)
{
radio.write(&button8, sizeof(button8))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip9) == LOW)
{
radio.write(&button9, sizeof(button9))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip10) == LOW)
{
radio.write(&button10, sizeof(button10))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
}
//-----Program Developed by R.Girish----//
Tím je uzavřen obvod dálkového ovladače.
Příjemce:
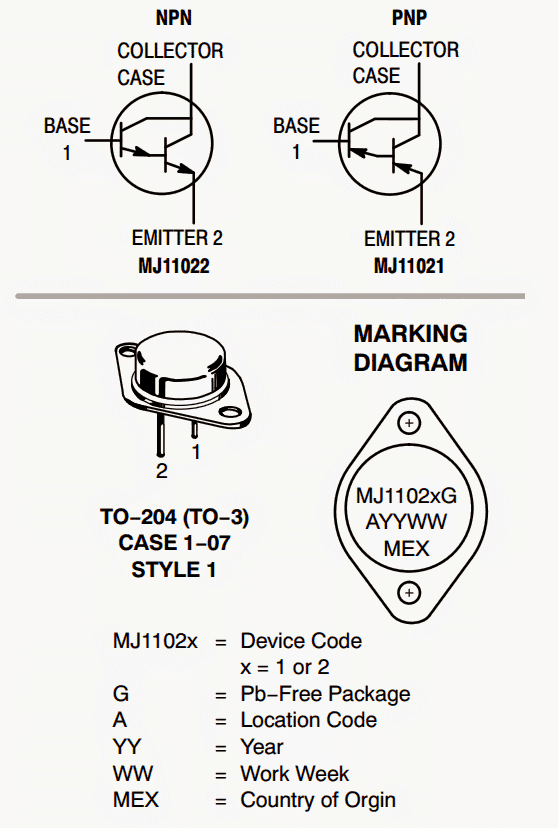
Obvod přijímače se skládá z Arduina, které si můžete vybrat, výstupního stupně tvoří 10 odporů omezujících proud 330 ohmů, 10 tranzistorů a 10 relé.
Na každém z 10 výstupních pinů Arduina je připojeno k 10 relé přes rezistor a tranzistor.
Ujistěte se, že je váš napájecí zdroj schopen dodávat proud alespoň 1 A, který je nezbytný pro provoz více relé najednou.
Modul transceiveru 2,4 GHz NRF24L01 zajišťuje komunikaci mezi dálkovým ovládáním.
Kruhový diagram:

Pokud jste zmateni schématem zapojení mezi Arduino a modulem NRF24L01, podívejte se na tabulku vedle schématu, je to stejné i pro obvod dálkového ovladače.
Sekvence výstupu a výstupní piny jsou následující:
Arduino PIN - výstupní sekvence
PIN 2 - VÝSTUP 1
PIN 3 - VÝSTUP 2
PIN 4 - VÝSTUP 3
PIN 5 - VÝSTUP 4
PIN 6 - VÝSTUP 5
PIN 7 - VÝSTUP 6
PIN 8 - VÝSTUP 7
PIN A0 - VÝSTUP 8
PIN A1 - VÝSTUP 9
PIN A2 - VÝSTUP 10
Výstupní fáze:

Pro jednoduchost diagramu je výstup předveden se dvěma výstupními stupni. Pokud používáte všech 10 kanálů, musíte jej rozšířit na deset.
Program pro přijímač:
//-----Program Developed by R.Girish----//
#include
#include
RF24 radio(9,10)
const byte address[][6] = {'00001', '00002'}
const int op1 = 2
const int op2 = 3
const int op3 = 4
const int op4 = 5
const int op5 = 6
const int op6 = 7
const int op7 = 8
const int op8 = A0
const int op9 = A1
const int op10 = A2
const char buzzer[32] = 'buzz'
char buttonstate[32] = ''
const char button1[32] = 'activate_1'
const char button2[32] = 'activate_2'
const char button3[32] = 'activate_3'
const char button4[32] = 'activate_4'
const char button5[32] = 'activate_5'
const char button6[32] = 'activate_6'
const char button7[32] = 'activate_7'
const char button8[32] = 'activate_8'
const char button9[32] = 'activate_9'
const char button10[32] = 'activate_10'
boolean status1 = false
boolean status2 = false
boolean status3 = false
boolean status4 = false
boolean status5 = false
boolean status6 = false
boolean status7 = false
boolean status8 = false
boolean status9 = false
boolean status10 = false
void setup()
{
Serial.begin(9600)
pinMode(op1, OUTPUT)
pinMode(op2, OUTPUT)
pinMode(op3, OUTPUT)
pinMode(op4, OUTPUT)
pinMode(op5, OUTPUT)
pinMode(op6, OUTPUT)
pinMode(op7, OUTPUT)
pinMode(op8, OUTPUT)
pinMode(op9, OUTPUT)
pinMode(op10, OUTPUT)
radio.begin()
radio.openReadingPipe(1, address[1])
radio.openWritingPipe(address[0])
radio.setChannel(100)
radio.setDataRate(RF24_250KBPS)
radio.setPALevel(RF24_PA_MAX)
radio.startListening()
}
void loop()
{
while(!radio.available())
radio.read(&buttonstate, sizeof(buttonstate))
Serial.println(buttonstate)
if((strcmp(buttonstate,button1) == 0) && status1 == false)
{
digitalWrite(op1, HIGH)
status1 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button1) == 0) && status1 == true)
{
digitalWrite(op1, LOW)
status1 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button2) == 0) && status2 == false)
{
digitalWrite(op2, HIGH)
status2 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button2) == 0) && status2 == true)
{
digitalWrite(op2, LOW)
status2 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button3) == 0) && status3 == false)
{
digitalWrite(op3, HIGH)
status3 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button3) == 0) && status3 == true)
{
digitalWrite(op3, LOW)
status3 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button4) == 0) && status4 == false)
{
digitalWrite(op4, HIGH)
status4 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button4) == 0) && status4 == true)
{
digitalWrite(op4, LOW)
status4 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button5) == 0) && status5 == false)
{
digitalWrite(op5, HIGH)
status5 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button5) == 0) && status5 == true)
{
digitalWrite(op5, LOW)
status5 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button6) == 0) && status6 == false)
{
digitalWrite(op6, HIGH)
status6 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button6) == 0) && status6 == true)
{
digitalWrite(op6, LOW)
status6 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button7) == 0) && status7 == false)
{
digitalWrite(op7, HIGH)
status7 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button7) == 0) && status7 == true)
{
digitalWrite(op7, LOW)
status7 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button8) == 0) && status8 == false)
{
digitalWrite(op8, HIGH)
status8 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button8) == 0) && status8 == true)
{
digitalWrite(op8, LOW)
status8 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button9) == 0) && status9 == false)
{
digitalWrite(op9, HIGH)
status9 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button9) == 0) && status9 == true)
{
digitalWrite(op9, LOW)
status9 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button10) == 0) && status10 == false)
{
digitalWrite(op10, HIGH)
status10 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button10) == 0) && status10 == true)
{
digitalWrite(op10, LOW)
status10 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
}
//-----Program Developed by R.Girish----//
Tím je přijímač uzavřen.
Má teoretický dosah 100 metrů, prakticky může pracovat kolem 30 metrů a více, může se lišit v závislosti na pevných překážkách mezi dálkovým ovladačem a přijímačem.
Jak provozovat tento projekt:
• Nejprve zapněte přijímač a poté dálkový ovladač.
• Stiskněte kterékoli z tlačítek na dálkovém ovladači po jednom.
• Pokud stisknete první tlačítko, spustí se odpovídající výstup, tj. Výstup 1 se zapne. Pokud znovu stisknete stejné tlačítko na dálkovém ovladači, vypne se výstup 1 na přijímači.
• Platí pro všechna tlačítka a 10 výstupů.
• Po použití vypněte dálkový ovladač.
Máte-li jakékoli další dotazy týkající se výše diskutovaného přepínače dálkového ovládání 2,4 GHz 10 kanálů, vyjádřete je prosím v sekci komentářů.
Dvojice: Obvod generátoru signálu Arduino PWM Další: Jak spustit servomotor pomocí IC 555