
V dnešní době se robotika stává jednou z nejpokročilejších v oblasti technologií. The aplikace robotiky hlavně zapojit do automobilů, zdravotnictví, stavebnictví, obrany a také používá jako hasicí robot pomoci lidem při požáru. Ovládání robota pomocí dálkového ovladače nebo přepínače je ale poměrně komplikované. Byl tedy vyvinut nový projekt, tj. Robot pro ovládání gesty založený na akcelerometru. Hlavním cílem tohoto projektu je ovládání pohybu robota gestem ruky pomocí akcelerometru.

Robot pro ovládání gest založený na akcelerometru
Robot pro ovládání gest založený na akcelerometru
Tento projekt zahrnuje sekci vysílače a přijímače. The požadované součásti k sestavení tohoto projektu jsou Ht12e, Ht12d, L293D, AT89S52, 7805, kondenzátor, krystal, konektor PBT, jednopólová anténa, odpor, LED, akcelerometr a baterie. Akcelerometr je základním zařízením tohoto projektu.
akcelerometr nebo vysílací zařízení závisí na gestu ruky. Prostřednictvím vysílacího zařízení je přijímán příkaz a je zpracováván pomocí mikrokontroléru At89S51. Tento mikrokontrolér dává signál robotovi k pohybu preferovaným směrem. Základní pracovní princip této robotické sady datových signálů údajů vysílajícího zařízení do mikrokontroléru namontovaného v robotu. Předprogramovaný mikrokontrolér běží podle programu, díky čemuž robot pracuje odpovídajícím způsobem.
Robot ovládaný gesty pomocí akcelerometru je jeden druh robota, který lze ovládat pohybem ruky umístěním akcelerometru. Tento projekt je rozdělen na dvě části vysílací zařízení a přijímací zařízení. Tam, kde gesto funguje jako vysílací zařízení a robot funguje jako přijímací zařízení. Když je na ruce umístěno vysílací zařízení (akcelerometr), vyšle robotovi signály pro požadovanou operaci.
Mezi hlavní komponenty používané ve vysílací sekci patří akcelerometr, komparátor, HT12E IC kodér a RF vysílač .
Akcelerometr
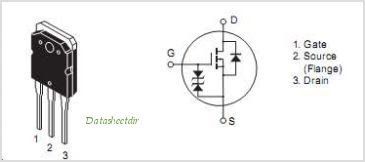
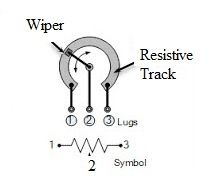
Akcelerometr je jeden typ snímače a poskytuje analogová data při pohybu ve směru X, Y a Z. Tyto směry závisí na typu snímače. Schéma akcelerometru je uvedeno níže. Tento senzor se skládá ze směrů šipek, pokud nakloníme senzor v jednom směru, pak se data na konkrétním kolíku změní ve formě analogu. Akcelerometr se skládá ze šesti kolíků, kde funkce každého pinu je diskutováno níže.

Akcelerometr
- Pin-1: Pin VDD se používá k napájení + 5V tohoto pin
- Pin-2: Pin GND je připojen k zemi za účelem předpětí
- Pin-3: Pin X bude přijímat data ve směru X.
- Pin-4: Pin Y bude přijímat data ve směru Y.
- Pin-5: Pin Z přijme data ve směru Z.
- Kolík 6: Kolík ST se používá k nastavení citlivosti akcelerometru 1,5 g nebo 2 g nebo 3 g nebo 4 g
Komparátor
Komparátor se používá ke změně analogového napětí na digitální napětí a porovnává toto analogové napětí s referenčním napětím a poskytuje přesné nízké nebo vysoké napětí
Kodér
Tento kodér se používá ke kódování 4bitových dat a vysílá pomocí modulu RF vysílače.
Modul RF vysílače
Modul RF TX pracuje s frekvencí 433 MHz a tento modul je snadno dostupný na trhu s nízkými náklady
Mezi hlavní komponenty používané v přijímací sekci patří přijímač, dekodér, mikrokontrolér a ovladač motoru.

Sekce vysílače
RF přijímač
RF přijímač tohoto projektu bude přijímat data, která jsou přenášena vysílacím zařízením.
Dekodér
Dekodér se používá ke změně sériových dat na paralelní data, která jsou přijímána z modulu RF přijímače.
Mikrokontrolér
The mikrokontrolér je nejdůležitější částí robota. V obvodu je použit mikrokontrolér řady 8051, který dává rozhodovací kapacitu
Řidič motoru
Ovladač motoru je zařízení, které umožňuje pohybu provádět úkoly jako motor. Takže vyžadujeme, aby řidič motoru běžel přes ovladač. Rozhraní mezi motorem a mikrokontrolérem lze v tomto obvodu provést pomocí IC ovladače motoru L293D.
V přijímací sekci přijímá modul RF přijímač data z vysílače. Přijatá data lze dekódovat pomocí IC HT12D. Přijatá data mohou být zpracována mikrokontrolérem AT89S51 a ovladač motoru se používá k ovládání motoru.

Sekce přijímače
Robot pro ovládání gest pracuje
Jak umístíme akcelerometr na vaši ruku, robot řízený pomocí akcelerometru se pohybuje podle pohybu ruky. Když nakloníme ruku s akcelerometrem před robotem, robot se začne pohybovat dopředu, dokud nebude uveden další pohyb. Když nakloníme ruku dozadu, robot změní směr a stav. Pak se začne pohybovat dozadu, dokud nebude vydán další signál. Když nakloníme ruku na levou stranu, pak se robot přesune na levou stranu, dokud nebude vydán další signál. Stejným způsobem, když nakloníme ruku na pravou stranu, pak se robot pohne pravou stranou.
Aplikace
The aplikace akcelerometru na základě gesta řízeného robota patří
- Tito roboti se používají ve vojenských aplikacích k ovládání robotů
- Tyto roboty se používají v lékařských aplikacích pro účely chirurgie
- Tato robotika se používá v oblasti stavebnictví
- Tato robotika se používá v průmyslových odvětvích k ovládání trolly a zvedání.
Toto je tedy vše o robotu pro ovládání gest založeném na akcelerometru, jeho práci a aplikacích. Doufáme, že jste tomuto konceptu lépe porozuměli. Kromě toho jakékoli pochybnosti týkající se tohoto konceptu nebo projekty elektroniky , poskytněte nám svůj názor komentářem v sekci komentářů níže. Zde je otázka, jaké jsou aplikace robota pro ovládání gest založeného na akcelerometru?
Fotografické kredity:
- Robot pro ovládání gest založený na akcelerometru ytimg
- Akcelerometr static.flickr






{kind=link}
{kind=link}