V tomto článku pojednáváme o návrhu obvodu, který pomůže optimalizovat točivý moment indukčního motoru používaného v elektrických vozidlech analýzou jeho aktuální spotřeby.
Použití střídače IC 555 pro řízení toque
Design je speciálně určen pro elektrická vozidla které jsou navrženy pro práci s indukčními motory, a proto je zde zahrnut střídač pro provoz indukčního motoru z baterie.
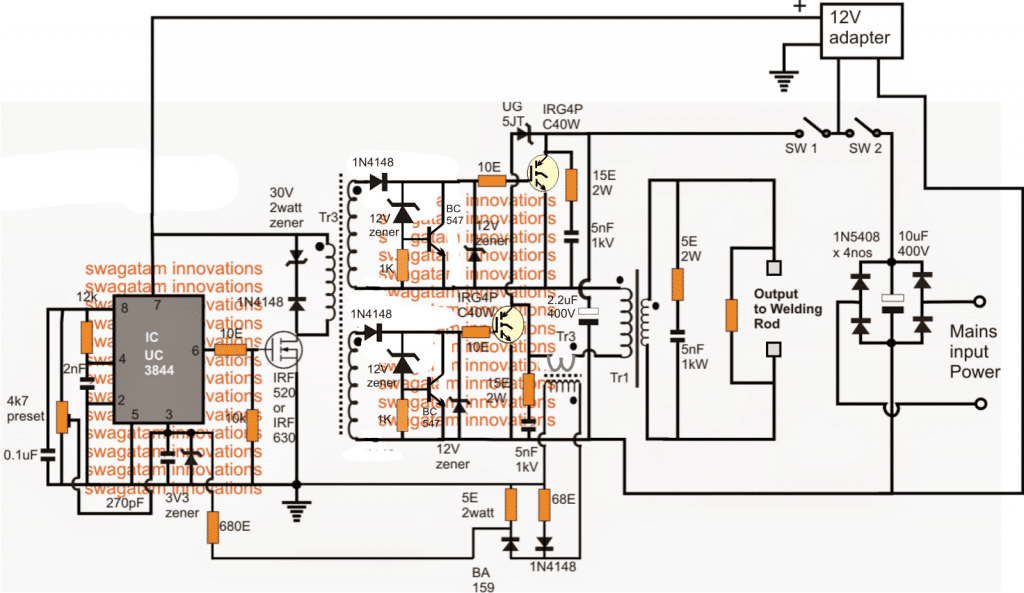
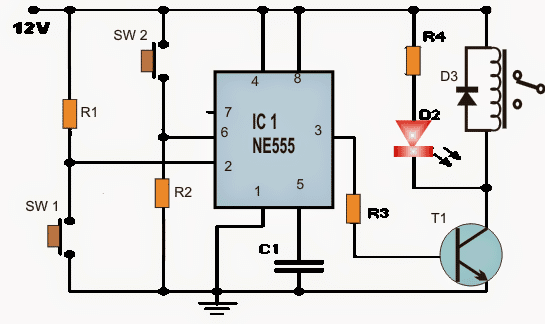
Navrhovaný obvod pro automatický optimalizátor točivého momentu pro indukční motor je uveden v následujícím diagramu. Vzhledem k tomu, že je navržen pro elektrické vozidlo, je zahrnut i invertorový obvod a je postaven pomocí IC 555.

IC 555 spolu s přidruženými mosfety a transformátorem tvoří a slušný invertorový obvod pro pohon specifikovaného jednofázového indukčního motoru z 12V nebo 24V baterie. Pro 24V baterii bude třeba krokovat sekci IC
až na 12 V prostřednictvím vhodného stupně regulátoru napětí.
Vrátíme-li se ke skutečné konstrukci, musíme se ujistit, že indukční motor spojený s transformátorem inicializuje s nižšími otáčkami a začne získávat hybnost, rychlost a točivý moment, jakmile se načte.
Pomocí techniky PWM
V zásadě k implementaci tohoto se PWM stává nejlepší technikou a také v tomto designu využíváme výhod Integrovaná optimalizace PWM modelu IC 555 Vlastnosti. Jak všichni víme, kolík # 5 IC 555 tvoří řídicí napětí
vstup IC, který reaguje na měnící se napětí, aby upravil úroveň šířky pulzu na svém pinu # 3, což znamená pro vyšší úrovně potenciálu na pinu # 5, šířka pulzu na pinu # 3 se rozšíří a pro nižší potenciály na pinu # 5 , šířka pulzu na pinu č. 3 se zužuje.
Abychom mohli převést specifikaci zátěže na měnící se napětí na pinu č. 5, potřebujeme obvodový stupeň, který je schopen převést rostoucí zátěž indukčního motoru na proporcionálně rostoucí potenciál
rozdíl na pinu č. 5 IC 555
Úloha snímače limitu proudu
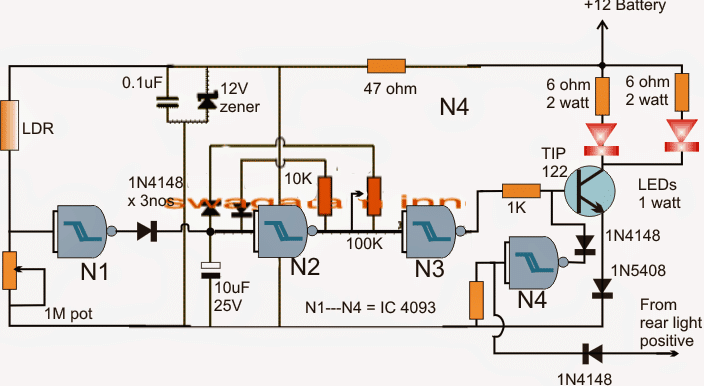
To se provádí zavedením a proudový rezistor Rx , který transformuje vzrůstající proud odebíraný zátěží na proporcionálně rostoucí potenciální rozdíl napříč sebou.
Tento potenciální rozdíl snímá BC547 a přenáší data na připojenou LED, což je vlastně LED uvnitř Optočlen LED / LDR vyrobeno doma ručně.
Vzhledem k tomu, že se jas LED zvyšuje v reakci na rostoucí spotřebu proudu připojenou zátěží, odpor LDR proporcionálně klesá.
LDR může být viděn jako součást sítě děliče potenciálů přes neinvertující vstup Opampu, takže když poklesne odpor LDR, potenciál na pinu # 3 na operačním zesilovači vzroste, což zase způsobí odpovídající zvýšení napětí na výstupu operační zesilovač.
Stává se to proto, že operační zesilovač je konfigurován jako obvod sledovače napětí, což znamená, že napěťová data na jeho kolíku # 3 budou přesně replikována na jeho výstupním kolíku # 6 a zesíleným způsobem.
Toto odpovídající vzrůstající napětí na pinu # 6 operačního zesilovače v reakci na rostoucí zátěž indukčního motoru napájí vzrůstající potenciál na pinu # 5 IC555. To zase způsobí, že počáteční užší PWM na pinu č. 3 IC 555 se rozšíří.
Když k tomu dojde, invertorové mosfety začnou vést více proudu do transformátoru, což umožní úměrně vyšší výkon indukčnímu motoru, a tento proces umožní, aby zátěž fungovala s větším výkonem a optimálně
výkon.
Naopak, jakmile se sníží zátěž, sníží se také proud skrz Rx, což sníží jas LED a odpovídajícím způsobem poklesne výstupní potenciál opamps, což nakonec způsobí, že IC 555 zúží PWM pro mosfety a sníží příkon na transformátor.
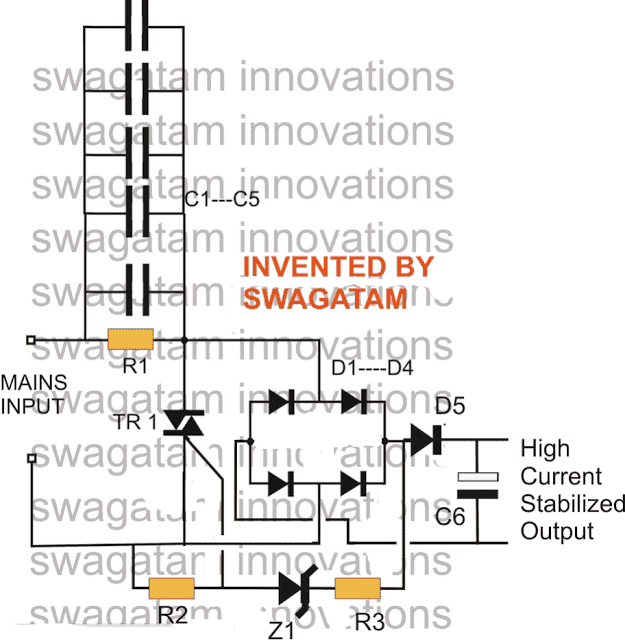
Použití optimalizátoru krouticího momentu pro motory běžeckého pásu
Výše vysvětlený obvod pro optimalizaci krouticího momentu pro indukční motory je určen pro elektrická vozidla, ale pokud máte zájem provozovat běžný vysoce výkonný stejnosměrný motor, jako je motor běhounu , v takovém případě lze část transformátoru jednoduše vyloučit a motor lze připojit přímo, jak je uvedeno v následujícím schématu:

Jsem si jistý, že byste měli mnoho dotčených otázek, takže je můžete vyjádřit prostřednictvím svých cenných komentářů. Všechny související dotazy budou zodpovězeny nejdříve
Předchozí: SG3525 Full Bridge Inverter Circuit Další: 10 stupňový sekvenční obvod spínače západky