Příspěvek vysvětluje ovladač stejnosměrného motoru, který je vybaven konstantní kompenzací točivého momentu, která umožňuje motoru běžet konstantní rychlostí bez ohledu na jeho zatížení.
Nevýhoda běžných regulátorů rychlosti
Jednou z nevýhod většiny jednoduché regulátory rychlosti poskytují pouze motoru předem stanovené konstantní napětí. Výsledkem je, že rychlost nezůstává konstantní a mění se podle zatížení motoru kvůli absenci kompenzace točivého momentu.
Například v modelu vlaku s jednoduchými ovladači se rychlost vlaku postupně snižuje pro stoupání a zrychluje při jízdě z kopce.
U modelových vlaků se tedy nastavení ovládání hrnce pro udržení zvolené rychlosti motoru rovněž liší v závislosti na zatížení, které může motor táhnout.
Obvod regulátoru otáček motoru s konstantním točivým momentem vysvětlený v tomto článku se zbaví tohoto problému sledováním otáček motoru a jeho udržováním na konstantní hodnotě pro předem stanovené nastavení řízení, bez ohledu na to, jaké zatížení může být na motoru.
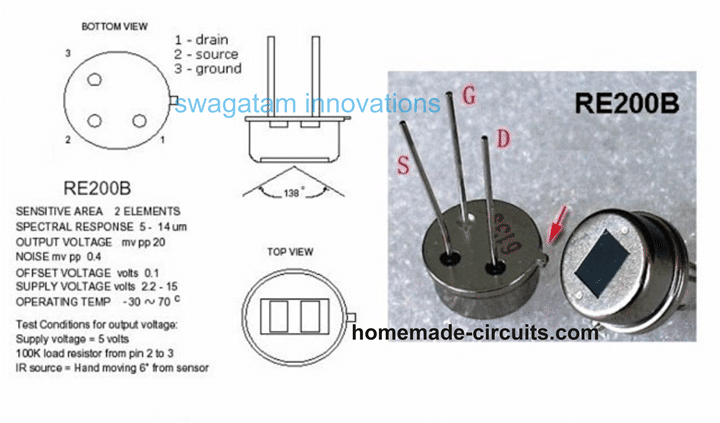
Obvod lze použít u většiny modelů, které používají stejnosměrný motor s permanentními magnety.
Výpočet faktoru zpětného EMF
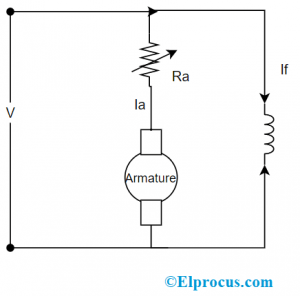
Napětí na svorkách motoru se skládá z několika faktorů, zadní e.m.f. produkované motorem a napětí pokleslo přes odpor kotvy.
Zadní e.m.f. generované vinutím motoru je obvykle úměrné rychlosti motoru, což znamená, že rychlost motoru lze sledovat měřením tohoto obsahu zpětného emf. Ale hlavním problémem je izolovat a detekovat zadní e.m.f. z napětí odporu kotvy.
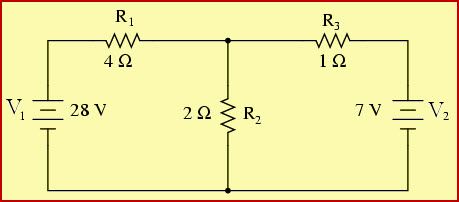
Předpokládejme, že je s motorem zapojen do série samostatný odpor, a poté, když vezmeme v úvahu, že tímto odporem prochází společný jediný proud a také odporem kotvy, pokles napětí napříč dvěma sériovými odpory by mohl dobře odpovídat poklesu odporu odporu kotvy.
Ve skutečnosti lze předpokládat, že když jsou tyto dvě hodnoty odporu identické, pak budou také dvě velikosti napětí napříč každým z odporů podobné. S těmito daty je možné odečíst pokles napětí R3 od napětí motoru a získat požadovanou zpětnou hodnotu pro zpracování.

Zpracování zpětného EMF pro konstantní točivý moment
Navrhovaný obvod nepřetržitě sleduje zadní e.m.f. a podle toho reguluje proud motoru, aby zajistil, že pro přiřazené nastavení řízení hrnce bude zadní e.m.f. spolu s otáčkami motoru udržován na konstantním momentu.
Pro usnadnění popisu obvodu se má za to, že P2 je upraven a udržován ve své střední poloze a odpor R3 je vybrán jako ekvivalent hodnoty odporu kotvy motoru.
Výpočet napětí motoru
Napětí motoru lze vypočítat přidáním zadního e.m.f. Va s poklesem napětí na vnitřním odporu motoru Vr.
Vzhledem k tomu, že R3 poklesne napětí Vr, bude se výstupní napětí Vo rovnat Va + 2 V.
Napětí na invertujícím vstupu (-) IC1 bude Va + Vr a na neinvertujícím vstupu (+) bude Vi + (Va + 2Vr - Vi) / 2
Protože výše uvedené dvě veličiny napětí mají být stejné, uspořádáme výše uvedenou rovnici jako:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
Zjednodušení této rovnice poskytuje Va = Vi.
Výše uvedená rovnice naznačuje, že zadní e.m.f. motoru je trvale udržováno na stejné úrovni jako řídicí napětí. To umožňuje motoru pracovat s konstantními otáčkami a točivým momentem při jakémkoli zadaném nastavení úpravy otáček P1.
P2 je součástí kompenzace rozdílové úrovně, která může existovat mezi odporem R3 a odporem kotvy. Provádí to úpravou velikosti kladné zpětné vazby na neinvertujícím vstupním operačním zesilovači.
Operační zesilovač LM3140 v zásadě porovnává napětí vyvíjené napříč armaturou motoru s ekvivalentem zpětného emf napříč motorem a reguluje základní potenciál T1 2N3055.
Konfigurace T1 jako sledovač emitorů reguluje otáčky motoru v souladu s jeho základním potenciálem. Zvyšuje napětí napříč motorem, když operační zesilovač detekuje vyšší zpětný emf, což má za následek zvýšení rychlosti motoru a naopak.
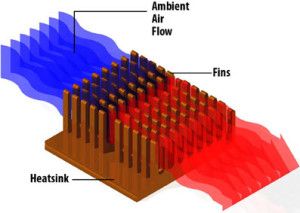
T1 by měl být namontován přes vhodný chladič pro správnou funkci.
Jak nastavit obvod
Nastavení obvodu regulátoru otáček motoru s konstantním momentem se provádí úpravou P2 s motorem s proměnlivým zatížením, dokud motor nedosáhne konstantního momentu bez ohledu na podmínky zatížení.
Pokud je obvod aplikován na modelové vlaky, je třeba dbát na to, aby se P2 příliš neotáčelo směrem k P1, což by mohlo vést ke zpomalení modelového vlaku, a naopak P2 se nesmí příliš otáčet v opačném směru, což by mohlo mít za následek rychlost vlaku se ve skutečnosti zvyšuje při stoupání do kopce.
Předchozí: Jednoduché Ni-Cd obvody nabíječky baterií prozkoumány Další: Obvod mini transceiveru