Tento všestranný integrovaný motorový řadič motoru BLDC (BLDC) je určen k řízení jakéhokoli 3fázového motoru BLDC s vysokým napětím a vysokým proudem vybaveným halovým efektem s extrémní přesností a bezpečností. Podívejme se podrobně na podrobnosti.

Pomocí IC MC33035
'Hrdinou' obvodu je jednočipový řadič MC33035, což je vysoce výkonný IC modul druhé generace, který nabízí všechny požadované aktivní funkce, které mohou být vyžadovány pro provozování většiny vysoce proudových, vysokonapěťových, 3fázových nebo 4fázových BLDC motory s otevřenou smyčkou nebo s uzavřenou smyčkou.

IC je vybaven dekodérem polohy rotoru pro umožnění přesného řazení komutace, teplotně kompenzovanou referencí pro usnadnění správného napětí senzoru, programovatelným kmitočtovým pilovým oscilátorem, třemi vestavěnými vysokotlakými budicími stupni otevřeného kolektoru a třemi vysokoproudými totemovými póly low-side ovladače typu, speciálně navržené pro provozování 3fázového H-můstku s vysokým výkonem s motorem MOSFET.
Čip je také vnitřně podpořen špičkovými ochrannými funkcemi a spolehlivě ovládá stupně, jako je blokování podpětí, omezení proudu po cyklu prostřednictvím možnosti nastavitelného vypnutí se zpožděním, interní vypnutí při vysoké teplotě IC a výhradně navržený chybový výstup pinout, který může být propojen s MCU pro preferované pokročilé zpracování a zpětnou vazbu.
Typické funkce, které lze s tímto integrovaným obvodem provést, jsou ovládání rychlosti otevřené smyčky, ovládání směru jízdy vpřed, „povolení běhu“, funkce nouzové dynamické brzdy.
Integrovaný obvod je navržen pro práci s motorovými senzory s fázemi 60 až 300 stupňů nebo 120 až 240 stupňů, jako bonus může IC také použít k ovládání tradičních kartáčovaných motorů.
Jak IC funguje
MC33035 patří mezi několik vysoce efektivních monolitických stejnosměrných stejnosměrných kontrolérů motorů vytvořených společností Motorola .
Skládá se z téměř schopností nezbytných k zahájení plnohodnotného, třífázového nebo čtyřfázového řídicího systému motoru s otevřenou smyčkou.
Dále lze řadič ovládat pro ovládání stejnosměrných motorů kartáčů. Navržen s bipolární analogovou technologií, nabízí vynikající úroveň účinnosti a trvanlivosti v bezohledném průmyslovém prostředí.
MC33035 nese dekodér polohy rotoru pro přesné řazení komutace, referenční prostředí s kompenzací prostředí, které je schopné dodávat výkon snímače, frekvenčně programovatelný pilový oscilátor, plně přístupný chybový zesilovač, komparátor modulátoru šířky pulzu, 3 výstupy horního pohonu otevřeného kolektoru a 3 vysoký proudový totem, nižší výstupy budiče právě pro MOSFET s provozním výkonem.
V MC33035 jsou integrovány možnosti stínění, které zahrnují podpěťové blokování, omezení proudu mezi cykly s volitelným časově zpožděným blokovacím režimem vypnutí, vestavěné tepelné vypnutí spolu s exkluzivním výstupem poruchy, který bude pohodlně propojen s mikroprocesorovým ovladačem.
Standardní atributy ovládání motoru zahrnují řízení rychlosti otevřené smyčky, otáčení vpřed nebo vzad, povolení běhu a dynamické brzdění. Kromě toho má MC33035 volicí kolík 60 ° / 120 °, který konfiguruje dekodér situace rotoru pro elektrické fázovací vstupy senzoru 60 ° nebo 120 °.

Funkce PIN OUT:
Pin1, 2, 24 (Bt, At, Ct) = Toto jsou tři horní výstupy měniče specifikované pro provoz externě nakonfigurovaných napájecích zařízení, jako jsou BJT. Tyto pinouty jsou interně konfigurovány jako režim otevřeného kolektoru.
Kolík č. 3 (vpřed, vzad) = Tento vývod je určen k ovládání směru otáčení motoru.
Kolík č. 4, 5, 6 (Sa, Sb, Sc) = Jedná se o 3 senzorové výstupy integrovaného obvodu přiřazené k ovládání řídicí sekvence motoru.
Pin # 7 (výstup povolen) = Tento pin IC je přiřazen k povolení provozu motoru, pokud je zde udržována vysoká logika, zatímco nízká logika slouží k povolení doběhu motoru.
Pin # 8 (referenční výstup) = Tento pin je vybaven napájecím proudem pro nabíjení časovacího kondenzátoru oscilátoru Ct a poskytuje referenční úroveň pro chybový zesilovač. Lze jej také použít k napájení napájení integrovaných obvodů snímače Hallova jevu motoru.
Pin # 9 (neinvertující vstup Current Sense) : Z tohoto pinoutu lze dosáhnout výstupu signálu 100 mV s odkazem na pin # 15 a používá se pro zrušení vedení výstupního spínače během specifikovaného cyklu oscilátoru. Tento vývod se normálně spojuje s horní stranou rezistoru snímajícího proud.
Pin # 10 (oscilátor) : Tento vývod určuje frekvenci oscilátoru pro IC pomocí RC sítě Rt a Ct.
Pin # 11 (neinvertující vstup chybového zesilovače) : Tento pinout se používá s potenciometrem regulace otáček.
Pin # 12 (Chyba invertujícího vstupu zesilovače) : Tento pin je interně spojen s výše uvedeným výstupem chybového zesilovače pro povolení aplikací otevřené smyčky .
Pin # 13 (výstup chyby zesilovače / vstup PWM) : Funkce tohoto pinoutu je poskytnout kompenzaci během aplikací s uzavřenou smyčkou.
Pin # 14 (chybový výstup) : Tento výstup indikátoru poruchy se může stát aktivním logickým minimem během několika kritických podmínek, jako jsou: Neplatný vstupní kód senzoru, Povolit pinout napájený nulovou logikou, Vstupní proudový vstupní pin vyšší než 100 mV (@ pin9 s odkazem na pin15) , spuštění blokování podpětí nebo situace tepelného vypnutí).
Pin # 15 (proudový invertující vstup) : Tento kolík je nastaven pro poskytování referenční úrovně pro interní prahovou hodnotu 100 mV a lze jej vidět připojený k rezistoru snímajícího proud na spodní straně.
Pin # 16 (GND) : Jedná se o zemnící kolík IC a je určen k poskytování zemního signálu do řídicího obvodu a je třeba jej odkazovat zpět na zem zdroje energie.
Pin # 17: (Vcc) : Toto je kladný kolík napájení určený k poskytování kladného napětí do řídicího obvodu IC. Minimální rozsah činnosti tohoto kolíku je 10 V a maximální při 30 V.
Pin # 18 (Vc) : Tento vývod nastavuje vysoký stav (Voh) pro nižší výstupy měniče prostřednictvím výkonu přiřazeného tomuto kolíku. Jeviště pracuje s rozsahem 10 až 30V.
Kolík # 19, 20, 21 (Cb, Bb, Ab) : Tyto tři pinouty jsou interně uspořádány ve formě výstupů totemového pole a jsou přiřazeny k pohonu výkonových zařízení se spodním výstupem pohonu.
Pin # 22 (60 D, 120D výběr fázového posuvu) : Stav přiřazený tomuto pinoutu konfiguruje provoz řídicího obvodu se senzory Hallova jevu pro vstupy fázového úhlu 60 stupňů (vysoká logika) nebo 120 stupňů (nízká logika).
Kolík 23 (brzda) : Logické minimum na tomto pinoutu umožní motoru BLDC běžet plynule, zatímco logické maximum okamžitě zastaví provoz motoru rychlým zpomalením.
FUNKČNÍ POPIS
Reprezentativní interní blokové schéma je znázorněno na výše uvedeném obrázku. Pojednání o výhodách a fungování každého z centrálních bloků vyjmenovaných níže.
Dekodér polohy rotoru
Dekodér polohy vnitřního rotoru měří 3 vstupy senzoru (piny 4, 5, 6), aby poskytl správné řazení horních a dolních vývodů pohonu. Vstupy senzorů jsou vyráběny pro přímé rozhraní s přepínači typu Hall Effect s otevřeným kolektorem nebo optickými spojkami.
Vestavěné pull-up rezistory jsou klasifikovány tak, aby omezovaly potřebné množství vnějších částí. Vstupy jsou kompatibilní s TTL a jejich prahové hodnoty jsou charakteristicky 2,2 V.
Řada integrovaných obvodů MC33035 je určena k ovládání 3fázových motorů a provozu se 4 nejoblíbenějšími konvencemi fázování senzoru. Účelně je dodáván 60 ° / 120 ° Select (Pin 22), který umožňuje MC33035 samostatně konfigurovat pro regulaci motorů s fázováním elektrického senzoru 60 °, 120 °, 240 ° nebo 300 °.
Se 3 vstupy senzoru objevíte 8 potenciálních formací vstupního kódu, z nichž 6 je legitimní umístění rotoru.
Další dva kódy jsou zastaralé, protože jsou obecně výsledkem otevřeného nebo zkratovaného připojení senzoru.
Se 6 oprávněnými vstupními kódy může dekodér případně zajistit polohu rotoru motoru v rozsahu 60 elektrických stupňů.
Vstup vpřed / vzad (pin 3) se používá jako nástroj pro úpravu průběhu harmonogramu motoru obrácením napětí na vinutí statoru.
Jakmile vstup změní stav, z nejvyšší na nejnižší pomocí přiřazeného vstupního programového kódu senzoru (například 100), přepnou se výstupy podporovaného horního a základního pohonu se stejným stavem alfa (AT na AB, BT na BB, CT na CB).
V zásadě je vyměnitelný řetězec změněn směr a motor obrací směrovou sekvenci. Řízení zapnutí / vypnutí motoru je dosaženo aktivací výstupu (pin 7).
Kdykoli zůstane odpojeno, interní zdroj proudu 25 μA umožňuje sekvenování výstupů předního a základního pohonu. Když jsou uzemněny, výstupy pohonu horní části se vypnou a pohony základny jsou stlačeny na nízkou úroveň, což evokuje motor k doběhu a výstup poruchy se spustí.
Dynamické brzdění motorem umožňuje vyvinout přebytečnou rezervu ochrany v konečném zařízení. Brzdného systému je dosaženo tím, že se váš brzdný vstup (Pin 23) dostane do vyššího stavu.
To vede k vypnutí horních výstupů měniče a aktivaci spodních měničů, což zkratuje motorem generovaný EMF. Brzdový vstup má absolutní, z celého srdce ohled na všechny ostatní vstupy. Interní roztahovací rezistorové linky s odporem 40 kΩ propojené pomocí bezpečnostního spínače programu zajišťují aktivaci brzdy v případě otevření nebo vypnutí.
Tabulka pravdy komutační logiky je uvedena níže. Pro zkoumání brzdného vstupu a vstupů do 3 horních výstupních výstupů BJT je použita brána se 4 vstupy NOR.

Cílem je obvykle vypnout brzdění, než dosáhnou horního výstupu pohonu vysoký stav. To vám umožní vyhnout se synchronizovanému zapůjčení horního a základního vypínače.
V polovodičových programech pohonu motoru nejsou vrchní součásti pohonu obecně potřeba a jsou ve většině případů ponechány oddělené. Za těchto okolností bude brzdění ještě dosaženo, protože brána NOR detekuje základní napětí na BJT výstupů horního pohonu.
Zesilovač chyb
Pro provádění řízení otáček motoru s uzavřenou smyčkou je nabízen vylepšený, plně kompenzovaný chybový zesilovač s aktivním přístupem ke každému vstupu a výstupu (piny č. 11, 12, 13).
Zesilovač je dodáván se standardním ziskem stejnosměrného napětí 80 dB, šířkou pásma zisku 0,6 MHz, spolu se širokým rozsahem vstupního napětí v běžném režimu, který se táhne od země k Vref.
Ve většině programů řízení rychlosti s otevřenou smyčkou je zesilovač nastaven jako sledovač napětí pro zisk jednoty s neinvertujícím vstupem spojeným se zdrojem napětí s nastavenou rychlostí.
Oscilátor Frekvence vnitřního rampového oscilátoru je pevně propojena s hodnotami, o nichž se rozhoduje pro časovací prvky RT a CT.
Kondenzátor CT bude nabíjen prostřednictvím referenčního výstupu (kolík 8) pomocí odporu RT a vybíjen vnitřním výbojovým tranzistorem.
Špičkové a jámové napětí rampy jsou obvykle 4,1 V a 1,5 V odpovídajícím způsobem. Chcete-li nabídnout slušný skok mezi slyšitelným šumem a výkonem přepínání výstupu, doporučuje se frekvence oscilátoru při výběru 20 až 30 kHz. Při výběru komponentu odkazujte na obrázek 1.
Modulátor šířky pulzu
Integrovaná modulace šířky pulzu nabízí energeticky efektivní přístup k řízení otáček motoru změnou standardního napětí připisovaného každému vinutí statoru v celé komutační sérii.
Při vybíjení CT oscilátor modeluje každý západku, což umožňuje vedení svrchních a nižších výstupů pohonu. Komparátor PWM resetuje horní západku a ukončí leasing dolního výstupu pohonu, jakmile se kladná rampa CT změní na více než výsledek chybového zesilovače.
Schéma časování pulzně šířkového modulátoru je znázorněno na obrázku 21.
Pulzní šířková modulace pro řízení rychlosti se projevuje výhradně na nižších výstupech pohonu. Proudový limit Neustálé fungování motoru, které může být značně přetíženo, vede k přehřátí a nevyhnutelné poruše.
Tuto škodlivou situaci lze snadno nejlépe odvrátit pomocí omezení proudu po jednotlivých cyklech.
To znamená, že každý cyklus je považován za nezávislou funkci. Omezení proudu cyklu po cyklu je dosaženo sledováním nárůstu proudu statoru pokaždé, když se aktivuje výstupní spínač, a po zjištění situace s vysokým proudem okamžité vypnutí spínače a jeho udržení po vynikající dobu intervalu rozběhu oscilátoru.
Proud statoru se transformuje na napětí aplikací uzemněného snímacího rezistoru RS (obrázek 36) v souladu se 3 spodními spínacími tranzistory (Q4, Q5, Q6).
Napětí vytvořené podél předjímajícího odporu je kontrolováno vstupem Current Sense (piny 9 a 15) a porovnáváno s vnitřním referenčním bodem 100 mV.
Současné vstupy komparátoru snímání přicházejí s rozsahem vstupního společného režimu zhruba 3,0 V.
V případě, že je překročena tolerance proudu snímání 100 mV, komparátor resetuje dolní zámek snímání a ukončí vedení výstupního spínače. Hodnota rezistoru pro snímání proudu je ve skutečnosti:
Rs = 0,1 / Istator (max)
Poruchový výstup se inicializuje v situaci vysokého zesilovače. Nastavení PWM s dvojitou západkou zajišťuje, že v průběhu určité oscilátorové rutiny vznikne pouze jeden jediný spouštěcí impuls výstupu, ať už je nebo není ukončen prostřednictvím výstupu chybového zesilovače nebo komparátoru mezních hodnot proudu.
Regulátor na čipu 6,25 V (Pin 8) nabízí nabíjecí proud pro časovací kondenzátor oscilátoru, referenční bod pro chybový zesilovač, který mu umožňuje dodávat proud 20 mA vhodný pro specifické napájení snímačů v programech nízkého napětí.
Při větším napětí by to mohlo být důležité pro výměnu energie vyzařované z regulátoru z IC. Toho je rozhodně dosaženo pomocí dalšího průchodu tranzistoru, jak je znázorněno na obrázku 22.
Jako referenční bod 6,25 V se zdálo být rozhodnuto umožnit vykreslení přímého obvodu NPN, kdykoli Vref - VBE překročí minimální napětí nezbytné senzory Hall Effect přes teplo.
Se správným sortimentem tranzistorů a dostatečným chlazením lze zakoupit až 1 ampér zátěžového proudu.
Blokování podpětí
Byly integrovány třícestné podpěťové blokování, aby se snížilo poškození IC a alternativních výkonových tranzistorů. Při nízkých faktorech napájení zajišťuje, že IC a senzory jsou zcela funkční a že je k dispozici odpovídající výstupní napětí základního pohonu.
Kladné napájecí zdroje pro IC (VCC) a nízké pohony (VC) jsou zkoumány nezávislými komparátory, které dosahují svých prahových hodnot na 9,1 V. Tato konkrétní fáze zaručuje adekvátní dojíždění brány potřebné k dosažení nízkého RDS (zapnuto) při každém pohonu běžného výkonu MOSFET zařízení.
Kdykoli přímo napájíte Hallovy senzory z reference, objeví se nevhodná funkce senzoru v případě, že výstupní napětí referenčního bodu poklesne pod 4,5 V.
K rozpoznání tohoto problému lze použít třetí komparátor.
Když více než jeden z komparátorů zachytí podpěťovou situaci, je zapnut chybový výstup, horní běhy jsou odloženy a výstupy základního pohonu jsou uspořádány v dolním bodě.
Každý z komparátorů obsahuje hysterezi k ochraně proti amplitudám při překlenutí svých individuálních prahových hodnot.
Poruchový výstup
Chybový výstup otevřeného kolektoru (pin 14) měl nabídnout podrobnosti analýzy v případě poruchy procesu. Má schopnost klesacího proudu 16 mA a může specificky řídit světelnou diodu pro viditelný signál. Kromě toho je ve skutečnosti pohodlně propojen s logikou TTL / CMOS pro použití v programu řízeném mikroprocesorem.
Poruchový výstup je efektivní nízký, zatímco nastane více než jedna z následujících situací:
1) Neplatné kódy vstupu snímače
2) Povolení výstupu při logice [0]
3) Vstup aktuálního proudu vyšší než 100 mV
4) Blokování podpětí, aktivace 1 nebo vyššího komparátoru
5) Vypnutí tepla, maximální teplota křižovatky se zvyšuje na maximum Tento exkluzivní výstup lze také použít k rozeznání mezi spuštěním motoru nebo trvalou funkcí v zaplavené situaci.
S pomocí RC sítě mezi chybovým výstupem a vstupem povolení to znamená, že můžete vytvořit časově zpožděné blokované vypnutí s ohledem na nadproud.
Dodatečné obvody zobrazené na obrázku 23 pomáhají usnadnit spouštění motorových systémů, které jsou vybaveny vyššími setrvačnými zátěžemi, tím, že poskytují dodatečný sběrací moment a přitom bezpečně chrání nadproudovou ochranu. Této úlohy je dosaženo dosažením aktuálního omezení na další než minimální hodnotu po stanovenou dobu. V průběhu mimořádně dlouhé nadproudové situace se kondenzátor CDLY nabije, což evokuje vstup povolení, aby se dostal přes svou toleranci k nízkému stavu.
Západku lze nyní tvarovat cyklem pozitivní zpětné vazby z chybového výstupu na povolený výstup. Je-li nastaven, pomocí vstupu Current Sense, lze jej resetovat pouze zkratováním CDLY nebo cyklováním napájecích zdrojů.
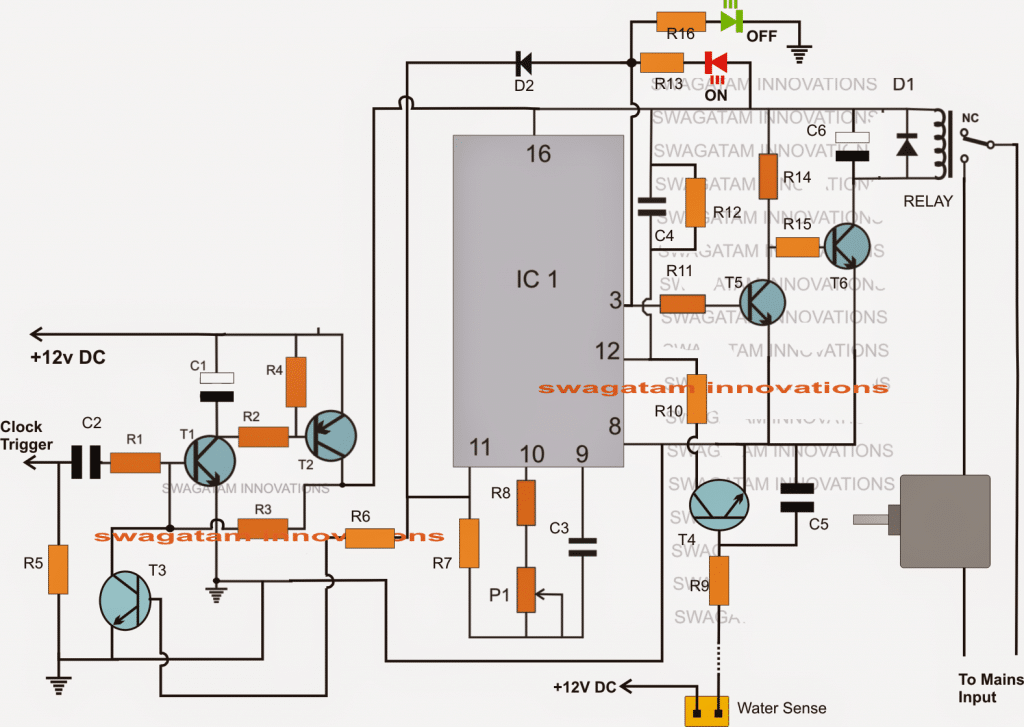
Plně funkční BLDC schéma s vysokým výkonem
Plně funkční vysokonapěťový vysokonapěťový obvod řadiče BLDC s použitím výše vysvětleného zařízení může být uveden níže, je nakonfigurován jako plnofázový, 3fázový, 6krokový režim:

Předchozí: Výpočet napětí, proudu v Buck induktoru Další: Vyrobte si tento elektrický skútr / okruh Rickshaw