Konfigurace flyback je upřednostňovanou topologií v aplikacích SMPS, zejména proto, že zaručuje úplnou izolaci výstupního stejnosměrného proudu od vstupního síťového střídavého proudu. Mezi další funkce patří nízké výrobní náklady, jednodušší design a nekomplikovaná implementace. Nízkoproudá DCM verze zpětných převodníků, které obsahují výstupní specifikaci nižší než 50 wattů, jsou široce používány než větší protějšky s velkým proudem.
Naučme se podrobnosti s komplexním vysvětlením prostřednictvím následujících odstavců:
Komplexní průvodce designem pro offline převodník DCM Flyback s pevnou frekvencí
Provozní režimy Flyback: DCM a CCM
Níže vidíme základní schematický návrh zpětného převaděče. Hlavními částmi v tomto provedení jsou transformátor, spínací výkonový mosfet Q1 na primární straně, můstkový usměrňovač na sekundární straně D1, a filtrační kondenzátor pro vyhlazení výstup z D1 a PWM řídicího stupně, kterým může být obvod ovládaný IC.

Tento typ zpětného letu může mít provoz CCM (režim nepřetržitého vedení) nebo DCM (režim přerušovaného vedení) na základě toho, jak je nakonfigurován výkonový MOSFET T1.
V zásadě máme v režimu DCM veškerou elektrickou energii uloženou v primárním transformátoru přenášenou přes sekundární stranu pokaždé, když je MOSFET vypnutý během jeho spínacích cyklů (také nazývaný doba zpětného chodu), což vede k tomu, že proud na primární straně dosahuje nulového potenciálu než se T1 bude moci znovu zapnout v dalším spínacím cyklu.
V režimu CCM nedostává elektrická energie uložená v primárním systému příležitost k úplnému přenosu nebo indukci přes sekundární zdroj.
Je to proto, že každý z následujících spínacích impulzů z PWM regulátoru zapne T1 před tím, než transformátor přenesl svou plnou uloženou energii do zátěže. To znamená, že zpětný proud (ILPK a ISEC) nikdy nesmí dosáhnout nulového potenciálu během každého ze spínacích cyklů.
Můžeme být svědky rozdílu mezi dvěma režimy provozu v následujícím diagramu prostřednictvím vzorců aktuálního průběhu v primární a sekundární části transformátoru.

Režimy DCM i CCM mají své specifické výhody, které lze zjistit z následující tabulky:

Ve srovnání s CCM vyžaduje obvod režimu DCM vyšší úrovně špičkového proudu, aby zajistil optimální výkon přes sekundární stranu transformátoru. To zase vyžaduje, aby primární strana byla hodnocena na vyšší RMS proud, což znamená, že MOSFET musí být hodnocena na specifikovaném vyšším rozsahu.
V případech, kdy je požadováno, aby návrh byl konstruován s omezeným rozsahem vstupního proudu a komponent, je obvykle vybrán fyback v režimu CCM, což umožňuje návrhu použít relativně menší filtrační kondenzátor a nižší ztrátu vodivosti na MOSFET a transformátoru).
CCM se stává příznivým pro podmínky, kde je vstupní napětí nižší, zatímco proud je vyšší (přes 6 ampérů), což je design, který může být hodnocen pro práci s 50 wattový výkon , s výjimkou výstupů při 5 V, kde výkonová specifikace může být nižší než 50 wattů.

Obrázek nahoře ukazuje aktuální odezvu na primární straně režimů zpětného letu a odpovídající vztah mezi jejich trojúhelníkovými a lichoběžníkovými průběhy.
IA na trojúhelníkové křivce indikuje minimální inicializační bod, který může být viděn jako nula, na začátku periody zapnutí MOSFET, a také vyšší špičková úroveň proudu přetrvávající v primárním vinutí transformátor v době, dokud se MOSFET znovu nezapne, během provozního režimu CCM.
IB může být vnímán jako cílový bod aktuální velikosti, zatímco MOSFET spínač je ZAPNUTÝ (interval ton).
Normalizovanou hodnotu proudu IRMS lze chápat jako funkci faktoru K (IA / IB) na ose Y.
To může být použito jako multiplikátor, kdykoli je třeba vypočítat odporové ztráty pro nejrůznější počet tvarů vln s odkazem na lichoběžníkový tvar vlny s plochým horním tvarem vlny.
To také ukazuje mimořádně nevyhnutelné ztráty stejnosměrným vedením vinutí transformátoru a tranzistorů nebo diod jako funkce průběhů proudu. S využitím těchto rad bude konstruktér schopen s tak dobře vypočítanou konstrukcí převodníku zabránit ztrátám vodivosti až 10 až 15%.
Zvažování výše uvedených kritérií se může stát rozhodujícím pro aplikace navržené pro zpracování vysokých proudů RMS a vyžadujících optimální účinnost jako klíčové vlastnosti.
Je možné eliminovat další ztráty mědi, i když to může vyžadovat impozantní velikost jádra pro přizpůsobení zásadně větší ploše vinutí okna, na rozdíl od situací, kdy se stávají rozhodujícími pouze základní specifikace.
Jak jsme dosud pochopili, provozní režim DCM umožňuje použití transformátoru menší velikosti, má větší přechodovou odezvu a pracuje s minimálními spínacími ztrátami.
Proto se tento režim stává vysoce doporučeným pro zpětné obvody specifikované pro vyšší výstupní napětí s relativně nižšími požadavky na ampéry.
I když je možné navrhnout zpětný převodník pro práci s režimy DCM i CCM, je třeba si uvědomit jednu věc, že během přechodu z režimu DCM do režimu CCM se tato funkce řazení transformuje na 2pólovou operaci, což vede k nízké impedance převodníku.
V této situaci je nezbytné začlenit další návrhové strategie, včetně různých smyček (zpětná vazba) a kompenzace sklonu s ohledem na systém vnitřní proudové smyčky. Prakticky to znamená, že se musíme ujistit, že převodník je primárně navržen pro režim CCM, přesto je schopen pracovat s režimem DCM, když se na výstupu používají lehčí zátěže.
Může být zajímavé vědět, že pomocí pokročilých modelů transformátorů bude možné vylepšit převaděč CCM čistší a lehčí regulací zátěže a také vysokou křížovou regulací v širokém rozsahu zátěže prostřednictvím transformátoru se stupňovitou mezerou.
V takových případech je malá mezera v jádře vynucena vložením vnějšího prvku, jako je izolační páska nebo papír, aby se zpočátku indukovala vysoká indukčnost a také umožnil provoz CCM s menší zátěží. Budeme o tom podrobně diskutovat někdy jindy v mých následujících článcích.
S takovými univerzálními charakteristikami režimu DCM není žádným překvapením, že se stane populární volbou, kdykoli je třeba navrhnout bezproblémový, efektivní a nízkoenergetický SMPS.
V následujícím se naučíme krok za krokem pokyny týkající se návrhu převaděče zpětného letu v režimu DCM.
Návrhové rovnice DCM Flyback a požadavky na postupné rozhodování
Krok 1:
Posuďte a odhadněte své konstrukční požadavky. Všechno SMPS design musí začít posouzením a určením specifikací systému. Budete muset definovat a přidělit následující parametry:

Víme, že parametr účinnosti je klíčový, o kterém je třeba rozhodnout jako první, nejjednodušší cestou je stanovit cíl kolem 75% až 80%, i když je váš design levným designem. Spínací frekvence označená jako
Fsw obecně musí být kompromitován a zároveň získat to nejlepší z velikosti transformátoru a ztrát způsobených přepínáním a EMI. Což znamená, že je třeba se rozhodnout pro spínací frekvenci alespoň pod 150 kHz. Typicky to může být vybráno mezi 50kHz a 100kHz rozsahem.
Kromě toho v případě, že je třeba do návrhu zahrnout více než jeden výstup, bude třeba upravit maximální hodnotu výkonu Pout jako kombinovanou hodnotu obou výstupů.
Možná vás bude zajímat, že až do nedávné doby byly nejběžnější konvenční SMPS designy používány pro MOSFET a Spínací regulátor PWM jako dva různé izolované stupně, integrované společně přes rozložení desky plošných spojů, ale v dnešní době v moderních jednotkách SMPS lze tyto dva stupně najít zabudované uvnitř jednoho balíčku a vyrobené jako jednotlivé integrované obvody.
Parametry, které se obvykle berou v úvahu při navrhování převaděče flyback SMPS, jsou 1) Specifikace aplikace nebo zátěže, 2) Cena 3) Pohotovostní napájení a 4) Další ochranné funkce.
Když se použijí integrované integrované obvody, obvykle se věci stanou mnohem jednoduššími, protože to vyžaduje pouze transformátor a několik externích pasivních komponent pro výpočet optimálního zpětného převaděče.
Pojďme se podívat na podrobnosti týkající se příslušných výpočtů pro návrh bezchybného SMPS.
Výpočet vstupního kondenzátoru Cin a rozsahu vstupního stejnosměrného napětí
V závislosti na specifikacích vstupního napětí a výkonu lze standardní pravidlo pro výběr Cin, které se také označuje jako kondenzátor stejnosměrného meziobvodu, zjistit z následujících vysvětlení:

Aby byla zajištěna široká škála provozu, může být pro kondenzátor stejnosměrného meziobvodu zvolena hodnota 2uF na watt nebo vyšší hodnota, což vám umožní mít pro tuto součást dobrý rozsah kvality.
Dále může být nutné určit minimální stejnosměrné vstupní napětí, které lze získat řešením:

Tam, kde se výboj stane poměrem výkonu kondenzátoru stejnosměrného meziobvodu, který může být zhruba kolem 0,2

Na obrázku výše můžeme vizualizovat napětí kondenzátoru meziobvodu. Jak je znázorněno, vstupní napětí vzniká při maximálním výstupním výkonu a minimálním vstupním střídavém napětí, zatímco maximální stejnosměrné vstupní napětí vzniká při minimálním vstupním výkonu (bez zátěže) a během maximálního vstupního střídavého napětí.
Během stavu bez zátěže jsme schopni vidět maximální stejnosměrné vstupní napětí, během kterého se kondenzátor nabíjí na špičkové úrovni vstupního střídavého napětí, a tyto hodnoty lze vyjádřit následující rovnicí:

Krok 3:
Vyhodnocování VR indukovaného napětí VR a maximálního napěťového napětí na MOSFET VDS. Flybackem indukované napětí VR lze chápat jako napětí indukované přes primární stranu transformátoru, když je mosfet Q1 ve vypnutém stavu.
Výše uvedená funkce zase ovlivňuje maximální hodnocení VDS mosfetu, které lze potvrdit a identifikovat řešením následující rovnice:

Kde, Vspike je napěťový hrot generovaný v důsledku indukčnosti úniku transformátoru.
Pro začátek lze použít 30% Vspike z VDSmax.
Následující seznam nám říká, kolik odraženého napětí nebo indukovaného napětí lze doporučit pro MOSFET s jmenovitým napětím 650 V až 800 V a s počáteční mezní hodnotou VR nižší než 100 V pro očekávaný obrovský rozsah vstupního napětí.

Výběr správné VR může být smlouvou mezi úrovní napěťového napětí přes sekundární usměrňovač a specifikacemi mosfetu na primární straně.
Pokud je VR zvolen velmi vysoký se zvýšeným poměrem otáček, vedlo by to k většímu VDSmax, ale nižší úrovni napěťového napětí na diodě sekundární strany.
A pokud je VR zvolen příliš malý díky menšímu poměru otáček, způsobí to, že VDSmax bude menší, ale povede to ke zvýšení úrovně napětí na sekundární diodě.
Větší primární strana VDSmax by zajistila nejen nižší úroveň napětí na diodě sekundární strany a snížení primárního proudu, ale také umožní realizaci nákladově efektivního návrhu.
Flyback s režimem DCM
Jak vypočítat Dmax v závislosti na Vreflected a Vinmin
V případě VDCmin lze očekávat maximální pracovní cyklus. Pro tuto situaci můžeme navrhnout transformátor podél prahových hodnot DCM a CCM. V tomto případě lze pracovní cyklus prezentovat jako:

Krok 4:
Jak vypočítat primární indukčnost proudu
V tomto kroku vypočítáme primární indukčnost a primární špičkový proud.
K identifikaci primárního špičkového proudu lze použít následující vzorce:

Jakmile je dosaženo výše uvedeného, můžeme pokračovat a vypočítat primární indukčnost pomocí následujícího vzorce v rámci hranic maximálního pracovního cyklu.

Je třeba věnovat pozornost zpětnému letu, nesmí jít do režimu CCM kvůli jakékoli formě podmínek nadměrného zatížení a pro tuto specifikaci maximálního výkonu je třeba vzít v úvahu při výpočtu Poutmax v rovnici # 5. Uvedená podmínka může nastat také v případě, že je indukčnost zvýšena nad hodnotu Lprimax, proto si je zapamatujte.
Krok 5 :
Jak vybrat optimální stupeň a velikost jádra:
Při výběru správné specifikace jádra a struktury může vypadat docela zastrašující, pokud navrhujete flyback poprvé. Protože to může zahrnovat významné množství faktorů a proměnných, které je třeba vzít v úvahu. Některé z nich, které mohou být rozhodující, jsou geometrie jádra (např. Jádro EE / jádro RM / jádro PQ atd.), Rozměr jádra (např. EE19, RM8 PQ20 atd.) A materiál jádra (např. 3C96. TP4, 3F3 atd).
Pokud máte ponětí, jak postupovat s výše uvedenými specifikacemi, účinným způsobem, jak čelit tomuto problému, může být doporučení a standardní průvodce výběrem jádra od výrobce jádra, nebo můžete také využít nápovědu k následující tabulce, která vám zhruba poskytne standardní rozměry jádra při navrhování zpětného toku DCM 65kHz s odkazem na výstupní výkon.

Jakmile skončíte s výběrem velikosti jádra, je čas vybrat správnou cívku, kterou lze získat podle datového listu jádra. Další vlastnosti cívky, jako je počet kolíků, montáž na desku plošných spojů nebo SMD, horizontální nebo vertikální umístění, to vše může být také třeba považovat za upřednostňovaný design
Materiál jádra je také zásadní a musí být vybrán na základě frekvence, hustoty magnetického toku a ztrát jádra.
Nejprve můžete vyzkoušet varianty s názvy 3F3, 3C96 nebo TP4A, nezapomeňte, že názvy dostupného materiálu jádra se mohou u stejných typů lišit v závislosti na konkrétní výrobě.
Jak vypočítat minimální primární otáčky nebo vinutí

Kde je termín Bmax znamená maximální provozní hustotu toku, Lpri vám řekne o primární indukčnosti, Ipri se stane primárním špičkovým proudem, zatímco Ae identifikuje plochu průřezu vybraného typu jádra.
Je třeba si uvědomit, že Bmax by nikdy nemělo být dovoleno překročit hustotu sytícího toku (Bsat), jak je uvedeno v datovém listu materiálu jádra. U feritových jader můžete najít mírné odchylky v Bsat v závislosti na specifikacích, jako je typ materiálu a teplota, ale většina z nich bude mít hodnotu blízkou 400 mT.
Pokud nenajdete žádné podrobné referenční údaje, můžete použít Bmax 300 mT. Ačkoli volba vyšší Bmax může pomoci při sníženém počtu primárních závitů a nižší vodivosti, ztráta jádra se může významně zvýšit. Pokuste se optimalizovat mezi hodnotami těchto parametrů, aby ztráty jádra i ztráty mědi byly udržovány v přijatelných mezích.
Krok 6:
Jak vypočítat počet závitů pro hlavní sekundární výstup (Ns) a různé pomocné výstupy (Naux)
V následujících situacích určete sekundární otáčky nejprve musíme najít poměr otáček (n), který lze vypočítat pomocí následujícího vzorce:

Kde Np je primární závit a Ns je sekundární počet závitů, Vout znamená výstupní napětí a VD nám říká o poklesu napětí na sekundární diodě.
Pro výpočet otáček pomocných výstupů pro požadovanou hodnotu Vcc lze použít následující vzorec:

Pomocné vinutí se stává rozhodujícím ve všech měničích zpětného chodu pro napájení počátečního spouštěcího napájení řídicího IC. Tento napájecí zdroj VCC se běžně používá k napájení spínacího integrovaného obvodu na primární straně a lze jej opravit podle hodnoty uvedené v datovém listu integrovaného obvodu. Pokud výpočet dává neceločíselnou hodnotu, jednoduše ji zaokrouhlete pomocí horní celočíselné hodnoty těsně nad tímto necelým číslem.
Jak vypočítat velikost drátu pro vybrané výstupní vinutí
Abychom mohli správně vypočítat velikosti vodičů pro několik vinutí, musíme nejprve zjistit specifikaci proudu RMS pro jednotlivé vinutí.
Lze to provést pomocí následujících vzorců:


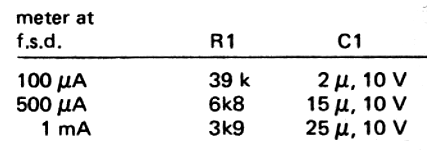
Jako výchozí bod by pro stanovení rozměru drátu mohla být použita proudová hustota 150 až 400 kruhových mil na ampér. V následující tabulce je uveden odkaz na výběr vhodného průřezu drátu pomocí 200M / A podle aktuální hodnoty RMS. Ukáže vám také průměr drátu a základní izolaci pro nejrůznější měřidlo super smaltovaných měděných drátů.

Krok 8:
Vzhledem k konstrukci transformátoru a Iteraci návrhu vinutí
Poté, co dokončíte určování výše diskutovaných parametrů transformátoru, je důležité vyhodnotit, jak přizpůsobit rozměr drátu a počet závitů v vypočítané velikosti jádra transformátoru a zadané cívce. Aby bylo toto právo optimálně, může být pro optimalizaci specifikace jádra s ohledem na rozchod drátu a počet závitů vyžadováno několik iterací nebo experimentů.
Následující obrázek ukazuje navíjecí plochu pro danou oblast Jádro EE . S odkazem na vypočtenou tloušťku drátu a počet závitů pro jednotlivé vinutí je možné přibližně odhadnout, zda se vinutí vejde do dostupné oblasti vinutí (š a v) nebo ne. Pokud vinutí nevyhovuje, pak jeden z parametrů z počtu závitů, rozměru drátu nebo velikosti jádra nebo více než 1 parametr může vyžadovat jemné doladění, dokud vinutí optimálně nesedí.

Uspořádání vinutí je zásadní, protože na něm podstatně závisí pracovní výkon a spolehlivost transformátoru. Doporučuje se použít sendvičové uspořádání nebo strukturu vinutí, aby se omezil únik indukčnosti, jak je znázorněno na obr.
Aby bylo možné vyhovět mezinárodním bezpečnostním pravidlům a vyhovět jim, musí mít návrh dostatečný rozsah izolace mezi primární a sekundární vrstvou vinutí. To lze zajistit použitím struktury navinuté na okraji nebo použitím sekundárního drátu s trojitou izolací drátu, jak je znázorněno na následujícím příslušném obrázku

Použití trojitého izolovaného drátu pro sekundární vinutí se stává snadnější volbou pro rychlé potvrzení mezinárodních bezpečnostních zákonů týkajících se návrhů flyback SMPS. Takové vyztužené dráty však mohou mít o něco vyšší tloušťku ve srovnání s normální variantou, která nutí vinutí zabírat více místa, a může vyžadovat další úsilí, aby se ve zvolené cívce vešlo.
Krok 9
Jak navrhnout obvod primární svorky
V přepínací sekvenci je po dobu VYPNUTÍ mosfetu vystaven vysokému napěťovému skoku v podobě únikové indukčnosti přes odtok / zdroj mosfetu, což by mohlo mít za následek lavinu, která by nakonec poškodila mosfet.
Aby se tomu zabránilo, je upínací obvod obvykle konfigurován napříč primárním vinutím, což okamžitě omezuje generovaný hrot na bezpečnou nižší hodnotu.
Najdete několik návrhů upínacích obvodů, které mohou být pro tento účel začleněny, jak je znázorněno na následujícím obrázku.

Jedná se zejména o svorku RCD a svorku Diode / Zener, u které je konfigurace a implementace mnohem snazší než u první možnosti. V tomto klešťovém obvodu používáme kombinaci usměrňovací diody a vysokonapěťové Zenerovy diody, jako je TVS (přechodový napěťový potlačovač) pro upnutí přepěťového hrotu.
Funkce Zenerova dioda znamená efektivně omezit nebo omezit napěťový hrot, dokud není svodové napětí zcela posunuto přes Zenerovu diodu. Výhodou Zenerovy kleště na diodu je, že se obvod aktivuje a sepne pouze v případě, že kombinovaná hodnota VR a Vspike překročí specifikaci poruchy Zenerovy diody, a naopak, pokud je hrot pod Zenerovou poruchou nebo bezpečnou úrovní, svorka se nemusí vůbec spustit, což neumožňuje zbytečný ztrátový výkon.
Jak vybrat upínací diodu / Zenerovo hodnocení
Mělo by to být vždy dvojnásobek hodnoty odraženého napětí VR nebo předpokládaného špičkového napětí.
Usměrňovací dioda by měla být ultrarychlá nebo by měla být schottkyho typu diody s hodnocením vyšším než maximální napětí meziobvodu.
Alternativní možnost upínání typu RCD má tu nevýhodu, že zpomaluje dv / dt MOSFET. Zde se stává důležitým parametr odporu rezistoru při omezování napěťového hrotu. Pokud je vybrána nízká hodnota Rclamp, zlepšilo by to ochranu hrotu, ale mohlo by to zvýšit rozptýlení a plýtvání energií. Naopak, pokud je vybrána vyšší hodnota Rclamp, pomohlo by to minimalizovat rozptyl, ale nemusí být tak efektivní v potlačování hrotů .

S odkazem na výše uvedený obrázek lze pro zajištění VR = Vspike použít následující vzorec

Tam, kde Lleak znamená indukčnost transformátoru a lze ji zjistit zkratem přes sekundární vinutí, nebo alternativně lze zahrnout pravidlo typu palec použitím 2 až 4% hodnoty primární indukčnosti.
V takovém případě by měl být kondenzátor Cclamp podstatně velký, aby zabránil nárůstu napětí během absorpční periody únikové energie.
Hodnotu Cclamp lze zvolit mezi 100pF až 4,7nF, energie uložená uvnitř tohoto kondenzátoru bude během spínacího cyklu eacj rychle vybita a obnovena Rclamp.
Krok 10.
Jak vybrat výstupní usměrňovací diodu

To lze vypočítat pomocí vzorce uvedeného výše.
Ujistěte se, že jste vybrali specifikace tak, aby maximální zpětné napětí nebo VRRM diody nebyly menší než 30% než VRVdiode, a také zajistěte, aby byl IF nebo lavinový dopředný proudový spec minimálně o 50% větší než IsecRMS. Přednostně použijte schottkyho diodu, abyste minimalizovali ztráty vedením.
U obvodu DCM může být špičkový proud Flybacku vysoký, proto zkuste zvolit diodu s nižším dopředným napětím a relativně vyššími specifikacemi proudu, s ohledem na požadovanou úroveň účinnosti.
Krok 11
Jak vybrat hodnotu výstupního kondenzátoru
Výběr a správně vypočítaný výstupní kondenzátor zatímco návrh zpětného toku může být nesmírně zásadní, protože v topologii zpětného toku není uložená indukční energie mezi diodou a kondenzátorem k dispozici, což znamená, že je třeba vypočítat hodnotu kondenzátoru zvážením 3 důležitých kritérií:
1) Kapacita
2) ESR
3) RMS proud
Minimální možnou hodnotu lze identifikovat v závislosti na funkci maximálního přijatelného zvlnění výstupního napětí mezi špičkami a lze ji identifikovat pomocí následujícího vzorce:

Kde Ncp označuje počet hodinových impulzů na primární straně požadovaných zpětnou vazbou řízení pro řízení provozu ze specifikovaných maximálních a minimálních hodnot. To může obvykle vyžadovat přibližně 10 až 20 spínacích cyklů.
Iout označuje maximální výstupní proud (Iout = Poutmax / Vout).
Chcete-li zjistit maximální hodnotu RMS pro výstupní kondenzátor, použijte následující vzorec:

Pro specifikovanou vysokou spínací frekvenci zpětného chodu bude maximální špičkový proud ze sekundární strany transformátoru generovat odpovídající vysoké zvlněné napětí uložené přes ekvivalentní ESR výstupního kondenzátoru. Vzhledem k tomu je třeba zajistit, aby hodnocení ESRmax kondenzátoru nepřekročilo specifikovanou přijatelnou schopnost zvlnění proudu kondenzátoru.
Konečný návrh může v zásadě zahrnovat požadované jmenovité napětí a schopnost zvlnění proudu kondenzátoru na základě skutečného poměru zvoleného výstupního napětí a proudu zpětného proudu.

Ujistěte se, že Hodnota ESR je určeno z datového listu na základě frekvence vyšší než 1kHz, u které lze obvykle předpokládat, že je mezi 10kHz a 100kHz.
Bylo by zajímavé poznamenat, že solitární kondenzátor s nízkou specifikací ESR může stačit k řízení zvlnění výstupu. Můžete se pokusit zahrnout malý LC filtr pro vyšší špičkové proudy, zvláště pokud je zpětný chod navržen pro práci s režimem DCM, což může zaručit přiměřeně dobrou kontrolu zvlnění napětí na výstupu.
Krok 12
Další důležité úvahy:
A) Jak vybrat jmenovité napětí a proud pro usměrňovací můstek na primární straně.

To lze provést pomocí výše uvedené rovnice.
V tomto vzorci PF znamená účiník napájecího zdroje, můžeme použít 0,5 v případě, že se správná reference stane mimo dosah. Pro můstkový usměrňovač vyberte diody nebo modul s předním zesilovačem 2krát více než IACRMS. Pro jmenovité napětí může být zvoleno při 600 V pro maximální specifikaci vstupu 400 V AC.
B) Jak vybrat rezistor proudu (Rsense):
Lze jej vypočítat pomocí následující rovnice. K interpretaci maximálního výkonu na výstupu zpětného chodu je zabudován snímací odpor Rsense. Hodnotu Vcsth lze určit s odkazem na datový list IC řadiče, Ip (max) označuje primární proud.

C) Výběr VCC kondenzátoru:
Optimální hodnota kapacity je rozhodující pro vstupní kondenzátor pro vykreslení správné spouštěcí doby. Jakákoli hodnota mezi 22uF až 47uF dělá práci dobře. Pokud je však zvoleno mnohem nižší, může to mít za následek spuštění „blokování podpětí“ na IC řadiče, než se převodník bude moci vyvinout Vcc. Naopak vyšší hodnota kapacity by mohla vést k nežádoucímu zpoždění doby spuštění převodníku.
Dále se ujistěte, že tento kondenzátor je v nejlepší kvalitě a má velmi dobré specifikace ESR a zvlnění proudu, na stejné úrovni jako výstup. specifikace kondenzátoru . Důrazně se doporučuje připojit další kondenzátor s menší hodnotou v řádu 100 nF, paralelně s výše diskutovaným kondenzátorem a co nejblíže k vývodům Vcc / země řídicí jednotky IC.
D) Konfigurace smyčky zpětné vazby:
Pro zastavení generování kmitání je důležité vyrovnání zpětnovazební smyčky. Konfigurace kompenzace smyčky může být pro flyback v režimu DCM jednodušší než pro CCM, kvůli absenci „pravé poloviny roviny nula“ ve výkonovém stupni, a proto není požadována žádná kompenzace.

Jak je uvedeno výše, přímý RC (Rcomp, Ccomp) se většinou stává dostatečným pro udržení dobré stability ve smyčce. Obecně lze vybrat hodnotu Rcomp mezi 1K a 20K, zatímco Ccomp může být v rozsahu 100nF a 470pF.
Tím je ukončena naše komplikovaná diskuse o tom, jak navrhnout a vypočítat převaděč zpětného letu, pokud máte nějaké návrhy nebo dotazy, můžete je umístit do následujícího pole pro komentář, vaše otázky budou zodpovězeny co nejdříve.
Zdvořilost: Infineon
Předchozí: Ultrazvukový bezdrátový indikátor hladiny vody - solární pohon Další: Porozumění PID regulátoru