
V období 18thstoletí došlo k vývoji stejnosměrných motorů. Vývoj stejnosměrných motorů se značně zlepšil a jsou významně používány v různých průmyslových odvětvích. Na počátku 18. století a s vylepšeními provedenými v roce 1832 byly stejnosměrné motory původně vyvinuty britským výzkumníkem Sturgeonem. Vynalezl počáteční typ komutátoru stejnosměrného motoru, kde má schopnost simulovat také strojní zařízení. Lze si ale klást otázku, jaké jsou funkce stejnosměrného motoru a proč je důležité vědět o řízení otáček stejnosměrného motoru. Tento článek tedy jasně vysvětluje jeho provoz a různé techniky řízení rychlosti.
Co je stejnosměrný motor?
Dc motor je provozován pomocí stejnosměrného proudu, kde transformuje přijatou elektrickou energii na mechanickou energii. To spouští rotační změnu v samotném zařízení, čímž dodává energii pro provoz různých aplikací ve více doménách.
Řízení otáček stejnosměrného motoru je jednou z nejužitečnějších funkcí motoru. Regulací otáček motoru můžete měnit otáčky motoru podle požadavků a dosáhnout požadované činnosti.
Mechanismus řízení rychlosti je použitelný v mnoha případech, jako je řízení pohybu robotických vozidel, pohyb motorů v papírnách a pohyb motorů ve výtazích, kde různé typy stejnosměrných motorů Jsou používány.
Princip fungování stejnosměrného motoru
Jednoduchý stejnosměrný motor pracuje na principu, že když je vodič nesoucí proud umístěn v a magnetický věrný d, zažívá mechanickou sílu. V praktickém stejnosměrném motoru je kotva proudem přenášejícím vodič a pole poskytuje magnetické pole.
Když je vodič (kotva) napájen proudem, vytváří svůj vlastní magnetický tok. Magnetický tok se buď přidává k magnetickému toku v důsledku vinutí pole v jednom směru, nebo ruší magnetický tok v důsledku vinutí pole. Akumulace magnetického toku v jednom směru ve srovnání s druhým působí silou na vodič, a proto se začne otáčet.
Podle Faradayova zákona elektromagnetické indukce rotující působení vodiče vytváří EMF . Tento EMF má podle Lenzova zákona sklon bránit se příčině, tj. Dodávanému napětí. Stejnosměrný motor má tedy velmi speciální charakteristiku pro nastavení jeho točivého momentu v případě měnícího se zatížení v důsledku zpětného EMF.
Proč je řízení otáček stejnosměrného motoru důležité?
Regulace otáček ve stroji ukazuje dopad na rychlost otáčení motoru, kde je tento přímý vliv na funkčnost stroje a je tak důležitý pro výkon a výsledek výkonu. V době vrtání má každý druh materiálu svou vlastní rychlost otáčení a mění se také na základě velikosti vrtáku.
Ve scénáři instalací čerpadel dojde ke změně propustnosti, takže dopravníkový pás musí být synchronizován s funkční rychlostí zařízení. Tyto faktory jsou buď přímo, nebo nepřímo závislé na rychlosti motoru. Z tohoto důvodu je třeba vzít v úvahu otáčky stejnosměrného motoru a sledovat různé typy metod regulace otáček.
Řízení otáček stejnosměrného motoru se provádí buď ručně pracovníkem, nebo pomocí jakéhokoli automatického ovládacího nástroje. To se zdá být v kontrastu s omezením rychlosti, kde musí existovat regulace rychlosti proti přirozené změně rychlosti z důvodu změny zatížení hřídele.
Princip regulace rychlosti
Z výše uvedeného obrázku je rovnice napětí jednoduchá Stejnosměrný motor je
V = Eb + IaRa
V je dodávané napětí, Eb je zadní EMF, Ia je proud kotvy a Ra je odpor kotvy.
Už to víme
Eb = (PøNZ) / 60A.
P - počet pólů,
A - konstantní
Z - počet vodičů
N- rychlost motoru
Dosazením hodnoty Eb v rovnici napětí dostaneme
V = (PøNZ) / 60A) + IaRa
Nebo V - IaRa = (PøNZ) / 60A
tj. N = (PZ / 60A) (V - IaRa) / ř
Výše uvedenou rovnici lze také napsat jako:
N = K (V - IaRa) / ř, K je konstanta
To znamená tři věci:
- Otáčky motoru jsou přímo úměrné napájecímu napětí.
- Rychlost motoru je nepřímo úměrná poklesu napětí kotvy.
- Rychlost motoru je nepřímo úměrná toku v důsledku nálezů v terénu
Otáčky stejnosměrného motoru lze tedy řídit třemi způsoby:
- Změnou napájecího napětí
- Změnou toku a změnou proudu vinutím pole
- Změnou napětí kotvy a změnou odporu kotvy
Několik technik regulace otáček stejnosměrného motoru
Jelikož existují dva typy stejnosměrných motorů, budeme zde jasně diskutovat o metodách řízení rychlosti jak u stejnosměrných řad, tak u bočníkové motory.
Řízení otáček stejnosměrného motoru v sériových typech
Lze jej rozdělit do dvou typů a to jsou:
- Technika řízená armaturou
- Technika řízená polem
Technika řízená armaturou je dále rozdělena do tří typů
- Odpor řízený kotvou
- Ovládání posunuté kotvy
- Napětí svorky armatury
Odpor řízený kotvou
Tato technika se nejčastěji používá tam, kde regulační odpor má sériové propojení s napájením motoru. Níže uvedený obrázek to vysvětluje.

Řízení odporu kotvy
Ztráty výkonu, ke kterým dochází v řídicím odporu motoru stejnosměrného motoru, lze ignorovat, protože tato regulační technika se většinou používá po dlouhou dobu, aby se snížila rychlost v době scénářů zatížení světlem. Jedná se o nákladově efektivní techniku pro trvalý točivý moment a je implementována hlavně v jeřábech, vlacích a jiných vozidlech.
Ovládání posunuté armatury
Zde bude reostat v obou sériích a posunovacím spojení s kotvou. Dojde ke změně úrovně napětí, která se aplikuje na kotvu, a to se mění změnou řady reostat . Zatímco ke změně budicího proudu dochází změnou směšovacího reostatu. Tato technika řízení rychlosti u stejnosměrného motoru není tak nákladná kvůli významným ztrátám výkonu v odporech regulace rychlosti. Rychlost lze do jisté míry regulovat, ale ne nad normální úroveň rychlosti.

Metoda řízení otáček stejnosměrného motoru s posunovanou kotvou
Napětí svorky armatury
Rychlost stejnosměrného motoru lze dosáhnout také napájením motoru pomocí individuálního různého napájecího napětí, ale tento přístup je nákladný a není extenzivně implementován.
Technika řízená polem se dále dělí na dva typy:
- Field Diverter
- Ovládání poklepaného pole (ovládání poklepaného pole)
Technika Field Diverter
Tato technika využívá přepínače. Rychlost toku, která je přes pole, lze snížit posunutím určité části proudu motoru přes sériové pole. Čím menší je odpor směrovače, tím je polní proud menší. Tato technika se používá pro více než normální rozsah rychlostí a je implementována u elektrických pohonů, kde se rychlost zvyšuje při poklesu zatížení.

Regulace otáček stejnosměrného motoru polního přepínače
Ovládání poklepaného pole
Také zde se snížením toku zvýší rychlost a toho se dosáhne snížením otáček vinutí pole od místa, kde dochází k toku proudu. Zde je počet odboček ve vinutí pole odstraněn a tato technika se používá v elektrických trakcích.
Řízení otáček stejnosměrného bočníku
Lze jej rozdělit do dvou typů a to jsou:
- Technika řízená polem
- Technika řízená armaturou
Polní metoda řízení pro DC směšovač
U této metody se magnetický tok způsobený polními vinutími mění, aby se měnila rychlost motoru.
Protože magnetický tok závisí na proudu protékajícím polním vinutím, lze jej měnit změnou proudu procházejícího polním vinutím. Toho lze dosáhnout použitím variabilního rezistoru v sérii s odporem vinutí pole.
Zpočátku, když je proměnný rezistor udržován v minimální poloze, jmenovitý proud protéká vinutím pole v důsledku jmenovitého napájecího napětí a ve výsledku je rychlost udržována normální. Když se odpor postupně zvyšuje, proud procházející vinutím pole klesá. To zase snižuje produkovaný tok. Rychlost motoru se tak zvyšuje nad jeho normální hodnotu.
Metoda řízení odporu kotvy pro stejnosměrný vypínací motor
U této metody lze otáčky stejnosměrného motoru regulovat řízením odporu kotvy pro řízení poklesu napětí na kotvě. Tato metoda také používá proměnný rezistor v sérii s kotvou.
Když proměnný rezistor dosáhne své minimální hodnoty, je odpor kotvy normální, a proto napětí kotvy klesá. Když se hodnota odporu postupně zvyšuje, napětí na kotvě klesá. To zase vede ke snížení rychlosti motoru.
Touto metodou se dosahuje rychlosti motoru pod normálním rozsahem.
Metoda řízení napětí armatury pro stejnosměrný vypínací motor (metoda Ward Leonard)
Ward Leonardova technika Obvod řízení otáček stejnosměrného motoru se zobrazuje takto:
Na výše uvedeném obrázku je M hlavní motor, kde má být regulována jeho rychlost, a G odpovídá individuálně buzenému stejnosměrnému generátoru, kde je poháněn pomocí třífázového motoru a může to být buď synchronní nebo indukční motor. Tento vzorec kombinace stejnosměrného generátoru a střídavého motoru se nazývá sada M-G.
Napětí generátoru se mění změnou proudu pole generátoru. Tato úroveň napětí, pokud je poskytována do sekce kotvy stejnosměrného motoru a poté M, se mění. Aby se udržel konstantní tok pole motoru, musí se proud pole motoru udržovat konstantní. Když jsou regulovány otáčky motoru, potom musí být proud kotvy motoru stejný jako jmenovitá úroveň.
Dodávaný polní proud se bude lišit, takže úroveň kotvy napětí se mění od „0“ po jmenovitou úroveň. Protože regulace otáček odpovídá jmenovitému proudu a s trvalým polním tokem motoru a polním tokem až do dosažení jmenovitých otáček. A protože výkon je součinem rychlosti a točivého momentu, má přímý poměr k rychlosti. S tím, když dojde ke zvýšení výkonu, se rychlost zvýší.
Obě výše uvedené metody nemohou poskytovat řízení rychlosti v požadovaném rozsahu. Kromě toho může metoda řízení toku ovlivňovat komutaci, zatímco metoda řízení kotvy zahrnuje velké ztráty energie v důsledku jeho použití rezistoru v sérii s kotvou. Proto je často žádoucí jiný způsob - ten, který řídí napájecí napětí pro řízení otáček motoru.
V důsledku toho se pomocí techniky Ward Leonard získává nastavitelný pohon a konstantní hodnota točivého momentu od minimální úrovně rychlosti po úroveň základní rychlosti. Technika regulace polního toku se používá hlavně tehdy, když je rychlost vyšší než základní rychlost.
Zde ve funkci je proud kotvy udržován na konstantní úrovni při zadané hodnotě a hodnota napětí generátoru je udržována na konstantní hodnotě. Při takové metodě přijímá vinutí pole pevné napětí a kotva dostane proměnné napětí.
Jedna taková metoda metody řízení napětí zahrnuje použití spínacího mechanismu k zajištění proměnlivého napětí do kotvy a druhá používá generátor poháněný střídavým motorem k zajištění proměnlivého napětí do kotvy ( Systém Ward-Leonard ).
The výhody a nevýhody oddělení Leonard metho d jsou:
Výhody použití techniky Ward Leonard pro řízení otáček stejnosměrného motoru jsou následující:
- V obou směrech lze plynule řídit rychlost zařízení pro rozšířený rozsah
- Tato technika má vlastní brzdnou schopnost
- Koncové reaktivní voltampéry jsou vyváženy přes měnič a značně vzrušený synchronní motor funguje jako měnič, takže dojde k přírůstku účiníku
- Pokud bliká zátěž, je hnacím motorem indukční motor mající setrvačník, který slouží ke snížení blikajícího zatížení na minimální úroveň
Nevýhody techniky Ward Leonard jsou:
- Protože tato technika obsahuje sadu motoru a generátoru, náklady jsou vyšší
- Konstrukce zařízení je složitá a má také vysokou hmotnost
- Potřebujete více místa pro instalaci
- Vyžaduje pravidelnou údržbu a založení není nákladově efektivní
- Dojde k obrovským ztrátám, a tak se sníží účinnost systému
- Je generován větší hluk
A aplikace metody Ward Leonard je plynulé řízení otáček stejnosměrného motoru. Několik příkladů jsou důlní výtahy, papírny, výtahy, válcovací stolice a jeřáby.
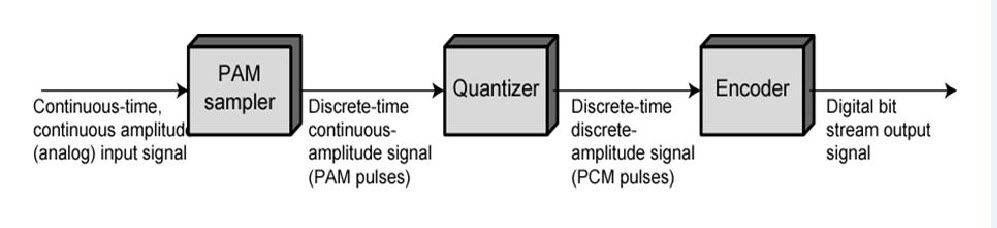
Kromě těchto dvou technik je nejpoužívanější technikou regulace otáček stejnosměrného motoru pomocí PWM k dosažení regulace otáček stejnosměrného motoru. PWM zahrnuje aplikaci pulzů různé šířky na ovladač motoru pro řízení napětí přiváděného do motoru. Tato metoda se ukazuje jako velmi účinná, protože ztráta energie je udržována na minimu a nezahrnuje použití žádného složitého zařízení.

Metoda řízení napětí
Výše uvedené blokové schéma představuje jednoduché regulátor otáček elektromotoru . Jak je znázorněno ve výše uvedeném blokovém schématu, mikrokontrolér se používá k napájení signálů PWM do ovladače motoru. Ovladač motoru je integrovaný obvod L293D, který se skládá z obvodů H-můstku pro pohon motoru.
PWM je dosaženo změnou pulzů aplikovaných na aktivační kolík IC ovladače motoru pro řízení aplikovaného napětí motoru. Variaci pulzů provádí mikrokontrolér se vstupním signálem z tlačítek. Zde jsou k dispozici dvě tlačítka, každé pro snížení a zvýšení pracovního cyklu pulzů.
Tento článek tedy podrobně vysvětluje různé techniky regulace otáček stejnosměrného motoru a to, jak je nejdůležitější sledovat rychlost. Dále se doporučuje vědět o regulátor otáček motoru 12 V DC .

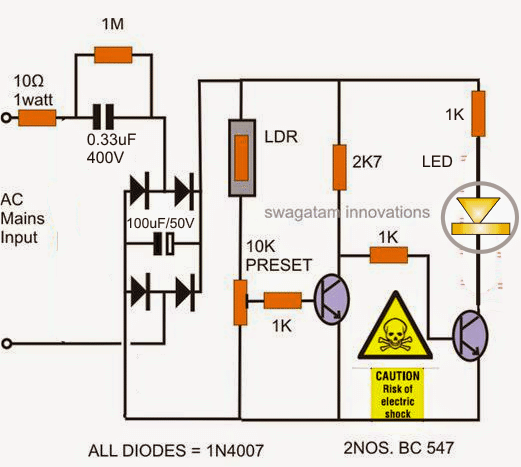







![Třpytivý LED květový obvod [Vícebarevný LED světelný efekt]](https://electronics.jf-parede.pt/img/3-phase-power/3B/glittering-led-flower-circuit-multicolored-led-light-effect-1.jpg)
