Příspěvek vysvětluje jednoduchý obvod ovladače motoru ovládaného liniovým laserem, který funguje tak, že reaguje na přesnou horizontální laserovou linii generovanou z lineárního laserového zařízení a automaticky upravuje zarovnání připojeného nástroje nebo práce s extrémní dokonalostí a přesností.
Co je to Line Laser
Lineární laserové zařízení je vysoce přesná elektronická náhrada tesaře starého vodováhy.
Lineární laserové zařízení je ve skutečnosti pokročilé laserové vyzařovací zařízení, které může generovat 360 ° vysoce přesná osvětlená horizontální laserová čára pro zajištění kalibračního odkazu na všechny průmyslové nebo stavební inženýrské práce, takže konečný výsledek úlohy je dokonale rovný a vyrovnaný bez sebemenší chyby.
O účast požádal jeden z oddaných čtenářů tohoto blogu, pan Rafal.
Podrobné diskuse týkající se pracovního postupu motoru řízeného liniovým laserem lze zjistit z následujících odstavců:
Cíl návrhu
Pan. Rafal: Jsem v tom velmi nový. V posledních několika týdnech jsem provedl nějaký průzkum a nenašel jsem přesně to, co potřebuji.
Budu vděčný za jakoukoli pomoc. Přikládám fotografii svého nápadu. Chci ovládat dva 12 V DC motory s laserovou hladinou.
Hladina čárového laseru bude signalizovat přijímače.

Tento signál pak bude muset řídit směr motoru 12 V DC. Motor otáčí závitovou tyčí tam a zpět, aby nastavil výšku nástroje.
Z toho, co jsem objevil, by bylo několik fotodiod připojených paralelně, jedna sada pro detekci laseru nad nulovou úrovní a druhá pod touto úrovní. Nulová úroveň je jen jakousi pauzou mezi fotodiodami, která brání probuzení systému. Laserový senzor bez displeje. Dal jsem jen obrázkovou fotografii.
Potřebuji obvod můstku H, ale vše, co jsem našel, je třeba použít se systémem Arduino. V případě potřeby si mohu koupit hotový most za rozumnou cenu až 30 $
V ideálním případě by to fungovalo s červeným i zeleným laserem, ale vlnové délky jsou tak odlišné, že pochybuji, že by to bylo možné, a nefungovalo by to v celém světelném spektru.
Zpočátku bych chtěl nastavit úroveň tohoto paprsku připojeného k motorům tlačítky nahoru-dolů. Byl bych rád, kdyby se druhý motor při nastavování vyrovnal gyroskopem, ale bez Arduina by to mohlo být velmi obtížné.
Cítím, že to, co se snažím dělat, je tak jednoduché, že se můžu dostat pryč bez použití Arduina. A trvám na analogu, kvůli obtížným podmínkám na staveništi a zdá se mi, že čím více elektroniky, tím nespolehlivější zařízení.
Fungovat bude pouze v interiéru a vzdálenost laseru je maximálně 10 metrů. Motor, který jsem našel na začátku, má velkou spotřebu proudu 200 mA max 2,19 A, ale také velký točivý moment.
Napájení 18 V DC z baterie Makita.
Díky předem za jakékoli návrhy.
Pozdravy z Polska
Rafal
Lup : Mám zmatek ohledně práce motorových hřídelí. Šroub se závitem na obou motorech zatlačí nástroj, ale nemůže jej vytáhnout zpět? Jak to funguje?
Je možné implementovat totéž s jediným motorem?
Pan. Rafal: Nižší vyrovnávací rovinky by byly asi 70 cm, pouze pro malé místnosti, např. toaleta, abyste mohli vstoupit dveřmi.
Stroj bez pohonu, ručně tažený, pouze srovnávací pravítka. Ve videu jsou dva žluté objekty na stožárech laserové detektory pevně spojené s přímkami.
Laser stojí někde dále a vytváří vodorovnou čáru.
Motory by byly připevněny k vozíku a závitový šroub k vyrovnávacím přímkám pomocí laserových detektorů. K vyrovnání obou stran musí být dva motory, ale je to zrcadlový obraz.
Jedinou společnou součástí by byl dvoukanálový H-můstek, jako kdybych to dělal z hotového modulu a případně gyroskopu, ale to je sen :).
Je důležité, aby existovalo tlačítko pro levou a pravou otáčku motoru.
Postup je takový. Laser pověsím například 2 m nad určenou úroveň podlahy. Změřil jsem 2 metry od laserového paprsku ke spodnímu okraji přímek.
Reguluji výšku stisknutím tlačítek na spínačích vpravo-vlevo tak, aby se rovnala 2 metrům ke spodnímu okraji přímek. Umístil jsem detektory na stožáry tak, aby byl laserový paprsek mezi fotodiodovými sekcemi na nulové úrovni. A zbytek si poradí sám
Do přílohy jsem vložil nákres činnosti detektoru.
Rafal
Návrh obvodu

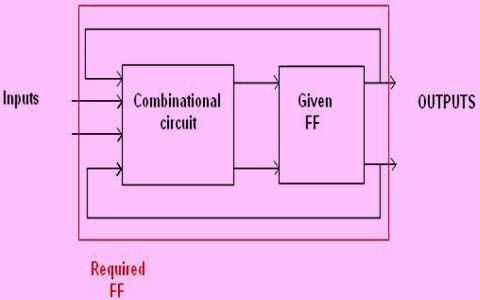
Při pohledu na obrázek výše budou pro detekci a opravu příslušného motorem ovládaného nástroje s ohledem na přesnost přímosti laserové čáry zapotřebí dva takové identické stupně obvodu.
Tyto dvě stejné fáze jsou vzájemně zrcadlovými obrazy, jak je znázorněno níže:

Obvody jsou poměrně jednoduché. Pracuje s komparátorem oken, který zajišťuje, že hnací motory jsou nefunkční, pokud je dvojice LDR vystavena stejnému jasu laserové čáry.
Jedna polovina napájecího napětí je poté generována na neinvertujícím vstupu A1 a na invertujícím vstupu A2.
Jakmile je detekována výchylka v laserové linii (k čemuž může dojít, pokud motorem ovládaný nástroj není vyrovnán rovně), změní se jas ovlivňující LDR R1 a R2.
V této situaci se vstupní napětí do okenního komparátoru odchyluje od poloviny napájecího napětí. Tato situace způsobí, že výstup komparátoru přikáže síti mostu motoru pohybovat motorem ve směru nebo proti směru hodinových ručiček.
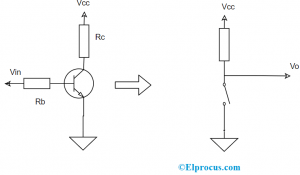
Tranzistory T1. . . T4 jsou konfigurovány jako můstková síť, která umožňuje přepnutí motoru dovnitř směr vpřed a vzad v závislosti na osvětlení LDR nebo úhlu odchylky laserové čáry.
Diody D1. . . D4 jsou umístěny tak, aby rušily napěťové špičky generované během doby, kdy je motor avtivní a běží. Funkce přednastavených potenciometrů P1 a P2 slouží k usnadnění nastavení vyrovnání.
Jsou vyladěny tak, aby motor byl zcela vypnutý a neaktivní, pokud je příslušný pár LDR vystaven přesně stejnému jasu laserového světla.
Řekněme například, že kvůli nesprávnému vyrovnání motorem ovládaného nástroje způsobí naklonění laserové čáry snížení světla na LDR R2 než LDR R1. To způsobí, že napětí v bodě A stoupne nad polovinu napájecího napětí.
V této situaci je výstup op zesilovače A1 vysoký, což nutí tranzistory T1 a T4 k činnosti. To zase způsobí otáčení motoru v příslušném směru. Tato akce automaticky posune připojený nástroj po přímce, dokud se přesnost jeho vodorovného vyrovnání neshoduje s přesností laserové čáry.
Naopak, pokud předpokládáme, že je nástroj nakloněn s opačnou orientací, takže osvětlení LDR je opačné, než bylo diskutováno výše, způsobí pokles napětí v bodě A pod polovinu napájecího napětí. Tato podmínka spustí výstup zesilovače A2 op tak, že T3 a T2 budou funkční.
To má za následek, že motor nyní běží v opačném směru, ve snaze opravit vyrovnání nástroje v příslušném směru, dokud se nestane dokonale rovným, což se shoduje s horizontální přesností laserové čáry.
Tlačítko nahoru / dolů
Tlačítka nahoru dolů pro počáteční přednastavení výšky vodováhy lze jednoduše implementovat zapojením tlačítkových spínačů paralelně ke každé z LDR.
Instalace LDR
Pro získání správné odezvy z LDR musí být páry levého a pravého nainstalovány uvnitř trubice jako pouzdro tak, aby byly schopny „vidět“ pouze laserové osvětlení, a nikoli jiné okolní světlo.
Tuto myšlenku můžete vidět na následujícím obrázku:

Zde vidíme, že LDR jsou umístěny velmi blízko u sebe, což zajišťuje, že když je laserová čára v přesném středu, bude určitá část obou párů LDR osvětlena laserovým světlem rovnoměrně.
Přední část krytu LDR by mohla být pokryta rozptýlenou čočkou, aby bylo možné rovnoměrně rozptýlit laserové osvětlení uvnitř příslušných LDR.
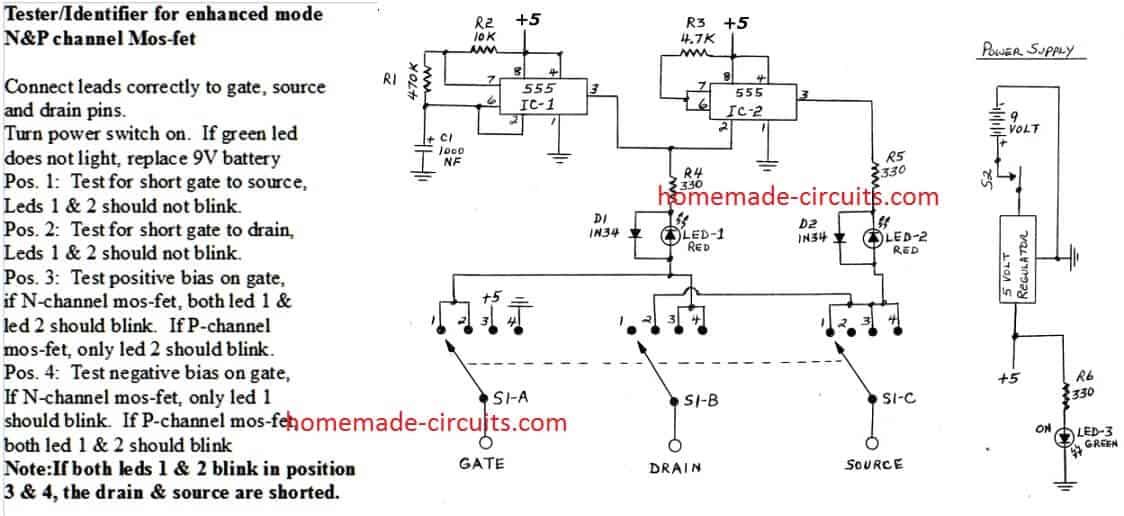
Předchozí: Jednoduchý obvod alarmu proti krádeži k ochraně cenných předmětů Další: Univerzální testovací obvod BJT, JFET, MOSFET


![Ovládání světel, ventilátoru pomocí dálkového ovládání TV [Plný obvodový diagram]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)