Příspěvek vysvětluje jednoduchou překážku, která se vyhýbá obvodu robota bez mikrokontroléru a bez použití speciálních obvodů ovladače motoru nebo integrovaných obvodů. Tuto myšlenku požadoval pan Faiyyaz
Design
V zásadě je to ve formě a jedoucí vozidlo který je schopen detekovat a vyhnout se potenciálním překážkám na své cestě a vhodně změnit směr tak, aby jeho pohyb zůstal nepřerušovaný, jednoduchý!
Provoz je tedy automatický bez jakéhokoli ručního nebo lidského zásahu.
Prezentovaná myšlenka, že robot se vyhýbá překážkám bez mikrokontroléru, jak název napovídá, mikrokontrolér nepoužívá, a proto je jeho výroba extrémně jednoduchá a je vhodná pro každého nového fanda.
Při navrhování obvodu jsem si uvědomil, že k implementaci principu bude zapotřebí alespoň několik modulů snímače překážek, protože použití jediného modulu může způsobit nepravidelný pohyb motoru a nemusí pomoci plynulému odklonu nebo otočení vozidla směrem k volná cesta.
Nastavení motoru vozidla je velmi podobné autíčko na dálkové ovládání o kterém jsem hovořil v jednom z dřívějších příspěvků.
Následující schéma představuje jeden z modulů systému, a proto by byly zapotřebí dva nebo pár takových modulů přes pravou a levou stranu vozidla.
Myšlenka je jednoduchá a funguje bez mikrokontroléru a bez speciálních integrovaných obvodů ovladače motoru. To znamená, že to zvládnete bez jakéhokoli druhu kódování a bez použití jakéhokoli druhu komplexního IC ovladače motoru ..... a obvod vám umožní použít jakýkoli stejnosměrný motor bez ohledu na jeho výkon, takže by mohla být odstraněna i vysoce výkonná překážka vyhýbající se vozidlům vyrobené pomocí tohoto obvodu, které se běžně používají v obchodních centrech a podobných maloobchodních prodejnách.
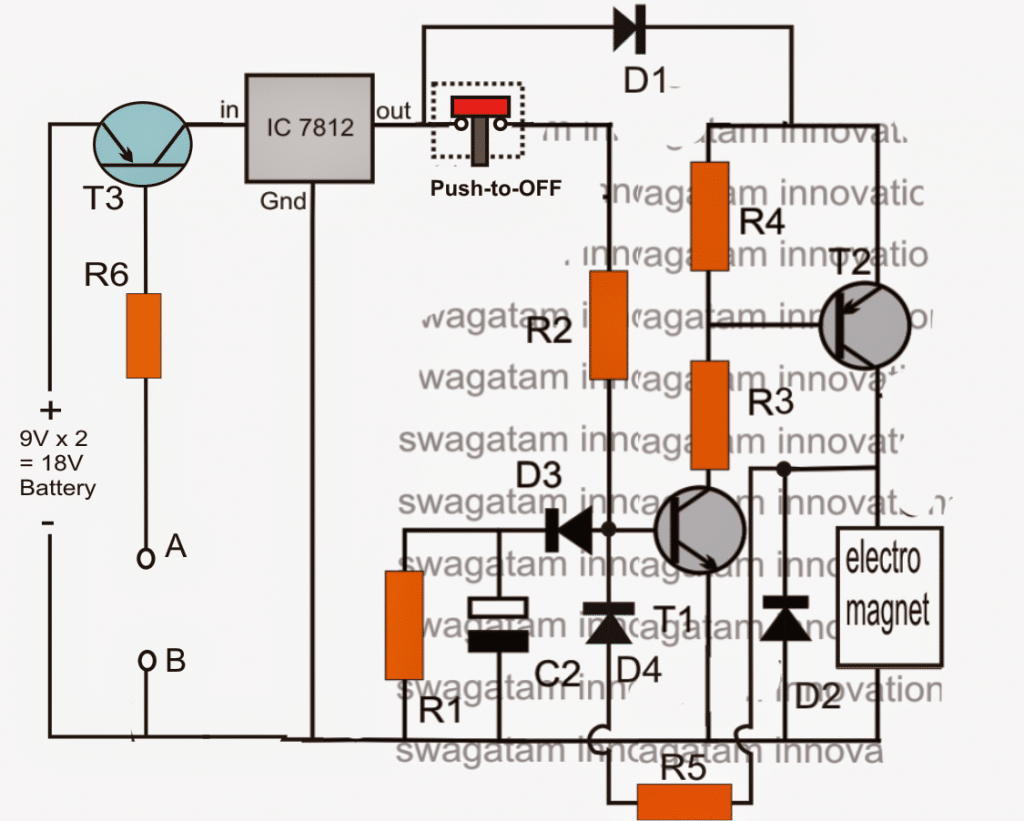
Kruhový diagram

Nyní se pokusíme porozumět výše uvedenému okruhu pomocí následujícího vysvětlení:
Jak to funguje
IC 555 je konfigurován jako IR vysílač a je nastaven na generování konstantní frekvence 38 kHz, zatímco sousední tranzistorový obvod je konfigurován jako přijímací stupeň nebo stupeň IR čidla.
Předpokládejme, že je to modul na pravé straně, a předpokládejme, že tento modul je první, kdo detekuje překážku v cestě.
Jakmile je tedy detekována překážka, frekvence 38kHz generovaná IC 555 se odráží směrem k senzoru sousedního přijímacího obvodu.
Přijímač okamžitě aktivuje přidružené tranzistory tak, že finální budicí tranzistor je znemožněn ve vedení.
Nyní má být motor, který je řízen tímto tranzistorem, umístěn na levé straně vozidla, tj. Na opačné straně tohoto modulu ... podobně motor na pravé straně je vlastně ovládán modulem na levé straně .
V důsledku toho, když se aktivuje výše uvedený předpokládaný modul detekce překážek na pravé straně, zastaví motor na levé straně, zatímco motor na pravé straně se může normálně pohybovat.
Tato situace vede k tomu, že vozidlo je nuceno odbočit na levou stranu ... což znamená, že předpokládaný levý modul začne dostávat ještě silnější signály překážek a bude nutit vozidlo, aby pokračovalo ve snaze pokračovat v probíhajícím odklonu, dokud se překážce zcela nevyhne. . Modul nyní přestává přijímat signály překážek a vozidlo se začne normálně pohybovat vpřed po své nové dráze.
Při provádění výše uvedeného odklonu je levý boční modul nucen být stále více izolován a od překážky tak, aby nedostal příležitost zasahovat do postupu a umožnit čisté a hladké odklonění vozidla.
Přesně stejné postupy jsou implementovány v případě, že modul na levé straně náhodou detekuje překážku před modulem na pravé straně, přičemž vozidlo je nuceno se stále více a více pohybovat směrem k pravé straně.
Můžeme také vidět „deaktivující“ fázi obvodu v modulu, které jsou vzájemně propojeny přes levé a pravé boční moduly. Tato fáze je záměrně zavedena, aby se zajistilo, že oba moduly nebudou nikdy aktivovány společně.
Proto například pokud se modul na levé straně stane prvním, kdo detekuje překážku, okamžitě deaktivuje modul na pravé straně a zahájí odklon vozidla vpravo a naopak.
IC senzoru může být standardní řada TSOP17XX
Další informace týkající se výše uvedeného IC senzoru se můžete dozvědět jak připojit TSOP1738 IC
A motor by měl být vybaven převodovkami, aby byl pohyb původně udržován na kontrolované úrovni.
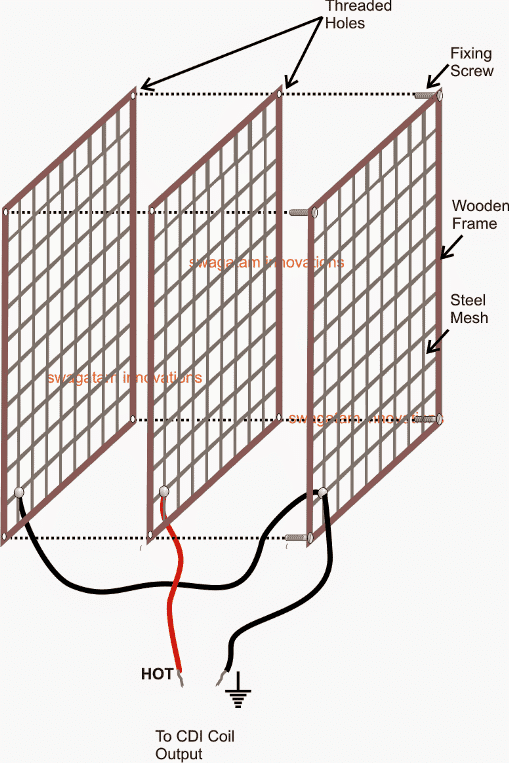
Nastavení kola
Kompletní nastavení levého a pravého modulu a související elektrická připojení můžete vidět na následujícím obrázku:

Aktualizace
Trochu přemýšlení nám říká, že výše uvedená jednoduchá překážka vyhýbající se obvodu robota by mohla být implementována také pomocí jediného modulu, místo dvou.
Jediný modul by však umožnil vozidlu provádět jednostranné odklonění pokaždé, když detekuje překážku, a proto by systém mohl být konfigurován buď k odklonění ve směru hodinových ručiček, nebo proti směru hodinových ručiček v závislosti na tom, který motor je pro dané akce připojen k obvodu.
Příklad nastavení lze vizualizovat na následujícím obrázku:

Zdá se však, že s výše uvedeným nastavením jediného motoru je jeden problém. Předpokládejme, že vozidlo narazí na levou stranu do pravého úhlu. To přinutí vozidlo pokračovat v pohybu proti směru hodinových ručiček, dokud nezatočí obrat a začne se pohybovat zpět stejným směrem od místa, kde začalo. To by uživatel neocenil.
Předchozí: SMD rezistory - úvod a práce Další: Jak funguje akcelerometr