V této části článku se dozvídáme o inovativní metodě převodu pedálového lisovacího mechanismu v elektrických vozidlech na odpovídajícím způsobem se měnící elektrický signál, který lze dále použít pro zpracování řízení rychlosti vozidla.
Vysvětlená koncepce bude fungovat jako elektronický akcelerátor, který při postupném sešlápnutí pedálu lineárně zvýší rychlost vozidla a naopak pomocí technologie PWM
Nápad požadoval pan Lokesh Maini
Technické specifikace
Jsem mechanik, momentálně pracuji na elektrickém vozidle a chci ovládat rychlost svého motoru pomocí pedálu. nedostávám ovladač pro svůj motor, prosím, pomozte mi vytvořit si vlastní, budu velmi
vděčný
Specifikace motoru jsou 36voltový, 43amperový a 1,5 hp kartáčovaný stejnosměrný motor.
Mechanický design
Elektronická verze pedálového akcelerátoru bude primárně vyžadovat mechanismus, který nejprve převede mechanické sešlápnutí pedálu na odpovídajícím způsobem se měnící elektrický signál, takže tento signál může být zpracován prostřednictvím stupně signálového procesoru pro požadovaný převod na praktické ovládání rychlosti vozidlo.
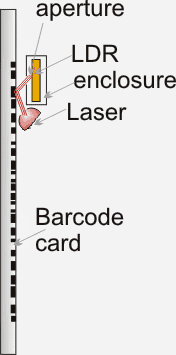
Lze vyzkoušet mnoho konceptů, například pomocí piezoelektrického snímače zátěže, snímače kapacitní zátěže, rezonančního snímače atd. V tomto článku se naučíme mnohem jednodušší metodu, kterou jsem navrhl a která obsahuje LED / LDR sestavu pro dosažení stejného .

V elektromechanickém uspořádání zobrazeném na obrázku výše můžeme vidět následující integrované komponenty:
Malý převod připojený pomocí šroubového mechanismu.
Hlava šroubu s bílou matnou reflektorovou plochou
Sestava LED / LDR umístěná před hlavou šroubu.
Jak funguje navrhovaný mechanismus.
Ozubené kolo zobrazené na výše uvedeném obrázku má být uzamčeno jiným ozubeným kolem s poměrem, který může být 10krát vyšší než toto ozubené kolo.
Větší rychlostní stupeň musí být nakonfigurován s pedálovým mechanismem tak, aby zahájil rotační pohyb v reakci na sešlápnutí pedálu.
Rotační odezva z ozubených kol bude zase produkovat dopředný pohyb hlavy šroubu přes komoru, kde je umístěna sestava LED / LDR.
Proces způsobí, že LDR bude proporcionálně proměnlivé množství odraženého světla od LED přijímat.
Tato proměnlivá data (ve formě proměnlivého odporu) odpovídající sešlápnutí pedálu mohou být poté přivedena do obvodu signálního procesoru pro vynucení zamýšlené regulace rychlosti konkrétního vozidla.
V další příspěvek naučíme se fázi signálového procesoru pomocí techniky PWM.
V výše uvedená část jsme se dozvěděli o jednoduché sestavě elektromechanického převodníku pro transformaci akce pedálu na proporcionálně se měnící elektrický signál.
Převod akce pedálu na PWM
Nyní pojďme studovat implementaci obvodu, která nám umožní převést elektrický signál pedálu na odpovídající měnící se signál PWM pro zamýšlenou regulaci rychlosti motoru vozidla.

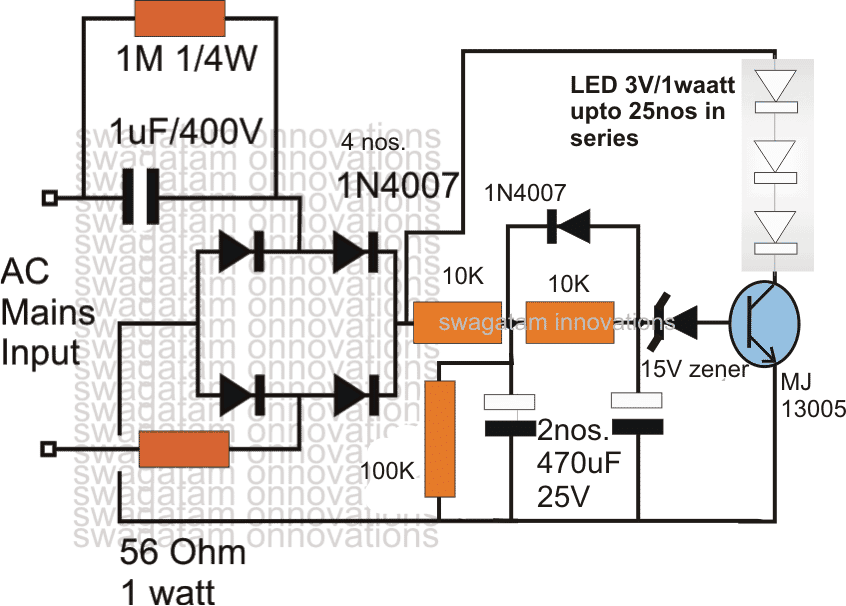
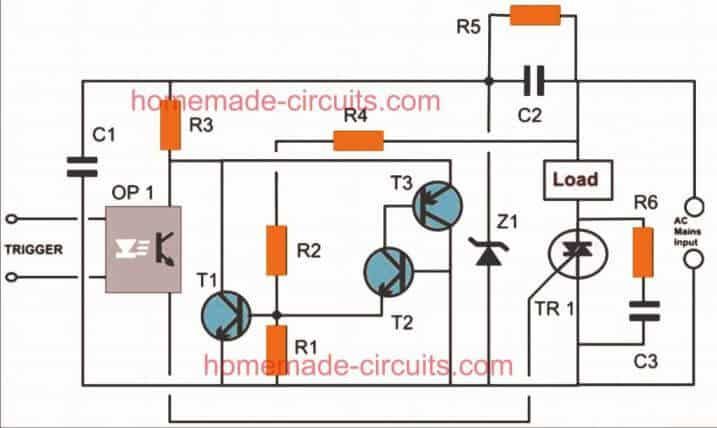
S odkazem na výše uvedené schéma zapojení můžeme posoudit provoz obvodu pomocí následujících bodů:
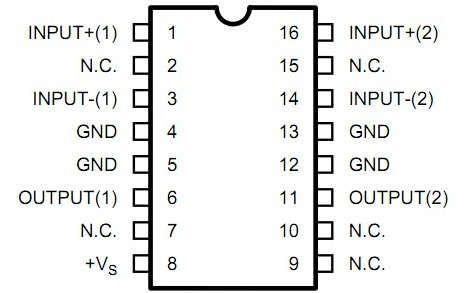
IC1 je konfigurován jako 80Hz generátor pulsů, který má maximální dobu zapnutí a minimální dobu vypnutí jako svůj pracovní cyklus
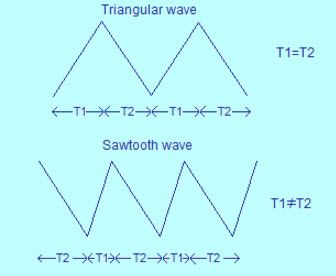
IC2 je upraven jako komparátor, který nejprve převádí pulz nad 80 Hz aplikovaný na jeho pin2 s trojúhelníkovými vlnami generovanými na jeho pin6 a porovnává trojúhelníkové vlny s modulačním napětím dostupným na jeho pin5.
Modulační napětí pin5 je odvozeno od vysílače BJT BC547, který je konfigurován jako společný kolektor s jeho základnou spojenou se vstupy LDR dosaženými z akcí pedálu.
Měnící se odpory v reakci na sešlápnutí pedálu se porovnávají s přednastaveným nastavením 100K a na základně tranzistoru se vyvíjí úměrná velikost napětí, která převádí vstup nízkého proudu na ekvivalentní signál vysokého proudu přes pin5 IC2.
Tato okamžitá úroveň potenciálu je přijata a zpracována IC2 generující úměrnou velikost signálů PWM pro mosfet a připojený motor.
Rychlost motoru je tak řízena a měněna podle kolísajících PWM v reakci na sešlápnutí pedálu vozidla.
Výše uvedené postupy účinně převádějí akce pedálu na řízené operace motoru vozidla a jeho rychlosti.
Jak nastavit obvod.
Je to velmi jednoduché.
- Sešlápněte pedál do maximálního bodu tak, aby hlava šroubu dosáhla do nejbližší možné polohy před sestavou LED / LDR.
- Dále upravte předvolbu 100k, dokud pin3 IC2 nezačne generovat PWM s maximální šířkou, což lze potvrdit měřením napětí na pin3 tak, aby se co nejvíce blížilo napájecímu napětí obvodu, tj. 5V.
- Jakmile to bude hotové, lze předpokládat, že je postup nastavení dokončen.
- Výsledky lze nyní ověřit sešlápnutím pedálu na různých úrovních a kontrolou otáček motoru se mění stejným způsobem.
Předchozí: Jednoduchý obvod měřiče ESR Další: Jak postavit Grow Light Circuit