Příspěvek vysvětluje, jak vyrobit levný, ale výkonný dálkově ovládaný vozík, s nímž může uživatel pomocí daného dálkového telefonu manévrovat podle potřeby doleva, doprava, dopředu a dozadu. Myšlenka se nespoléhá na obvod mikrokontroléru.
V jednom ze svých předchozích příspěvků jsem diskutoval o a jednoduchý dálkově ovládaný obvod autíčka „Současná myšlenka dálkově ovládaného vozíku je inspirována stejným konceptem, ale je určena k přepravě impozantních a mnohem těžších břemen.
Dálkově ovládaný vozík pro maloobchodní prodejny
Tento design může být zvláště vhodný a použitelný pro obchodní střediska nebo nákupní maloobchodní prodejny, kde může být implementován jako malé dopravní vozidlo pro přepravu materiálu uvnitř areálu nebo předpoklady pomocí několika lisů vzdálené jednotky Tx.
Prvním krokem při konstrukci navrhovaného dálkově ovládaného vozíku by bylo pořízení sady standardních RF modulů Rx / Tx buď od místního prodejce elektroniky, nebo z jakéhokoli online obchodu, doporučuji nákup z online obchodu, protože by to bylo mnohem jednodušší a pohodlnější , i když nákladnější.
Obstarané jednotky budou vypadat takto:
Pomocí 433MHz Tx, Rx modulů

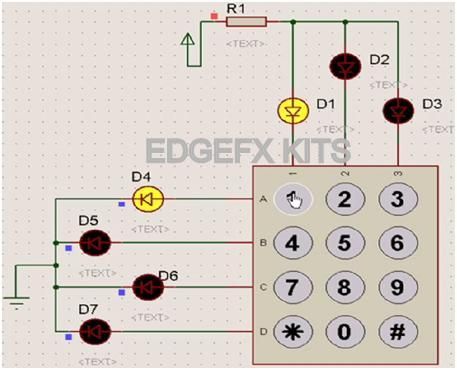
Levá hnědá barevná jednotka je Tx nebo vysílací jednotka, zatímco sousední široký obvod je Rx nebo přijímací jednotka.
Jednotku Tx lze vidět pomocí 4 červeně zbarvených tlačítek označených jako A, B, C, D a deska Rx může být svědkem 4 relé (černé barevné rámečky).
Čtyři příslušná tlačítka modulu Tx jsou bezdrátově spojena pro ovládání čtyř odpovídajících relé modulu Rx.
Vidíte konektory upevněné kolem okrajů desky (zeleně zbarvené), tyto konektory jsou vhodně zakončeny vstupy napájení (+) (-) pro desku Rx a také kontakty relé pro všechna 4 relé.
Relé, jak všichni víme, se skládá z 5 základních kontaktů a jejich pinoutů: 2 piny pro cívku, jeden pro pól a jeden pro N / C a N / O.
Jelikož v jednotce Rx jsou 4 relé, budete moci najít 5 x 4 = 20 výstupů spojených s příslušnými spojovacími body.
Mohlo by být zdlouhavým úkolem samostatně sledovat tyto zakončení relé na konektorech, proto doporučuji pájení vodičů přímo na pinoutech relé, abyste se ušetřili od výše uvedeného úkolu, toto úsilí bude vyžadováno později, když zapojíme jednotku do ovládací obvod vozíku.
Sestavení řídicího obvodu relé pro vozík
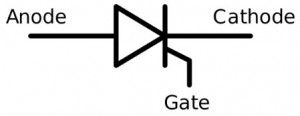
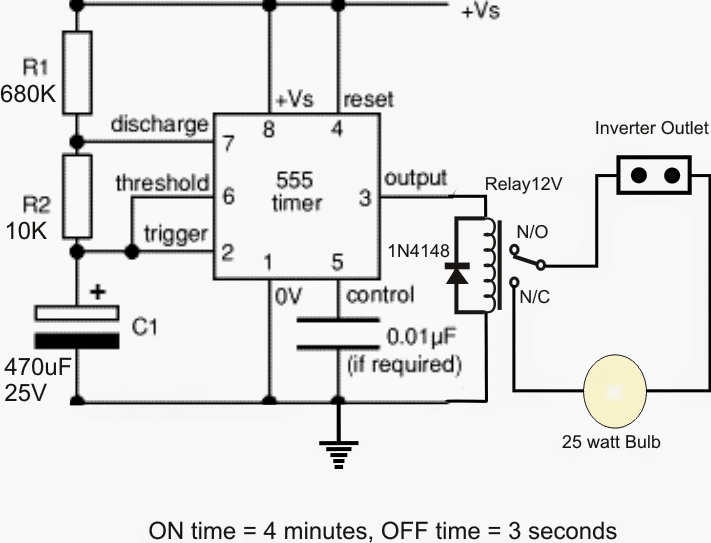
K tomu budete potřebovat několik relé a diod. Relé by měla být správně dimenzována, aby zvládla vysoce výkonné motory kol vozíku. K tomu doporučuji použít relé OEN make, jak ukazuje následující obrázek:

Diody, které budou vyžadovány v obvodu budiče relé, mohou být naše standardní diody 1N4007.
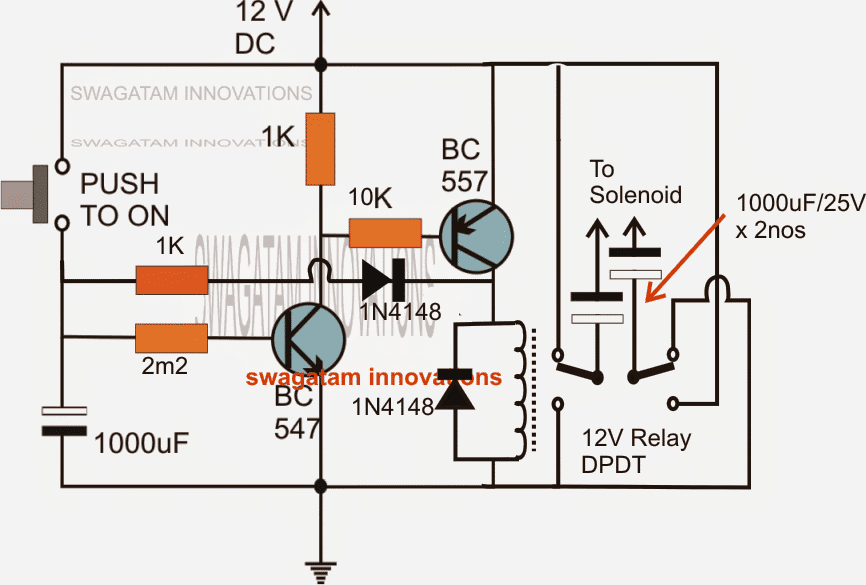
Podrobnosti o obvodu stejného lze vidět v následujícím diagramu:
Detaily a schéma zapojení relé


Jak funguje obvod dálkového vozíku
Pomocí výše uvedených relé a diod budete muset dokončit sestavení výše uvedené desky plošných spojů ovladače relé, což lze jednoduše provést na kusu veroboardu.
Poté máme k dispozici hlavní úkol, kterým je integrace zelených vodičů zobrazených ve výše uvedeném diagramu s deskou Rx dálkového ovládání.
Před integrací budeme muset vložit některé mody do modulu Rx, jak je vysvětleno níže:
Pomocí kusů izolovaných vodičů, vhodně odizolovaných a pocínovaných na koncích, pokračujte ve spojování (pájením) všech pólových kontaktů relé a propojte tento společný spoj s kladným vedením desky Rx.
Nyní v této situaci můžeme předpokládat, že když relé nejsou v aktivovaném stavu (prostřednictvím vzdáleného sluchátka), bude kladný vstup pólu každého relé spojen s jejich příslušnými N / C body a při aktivaci bude kladný pól z pólu posuňte a spojte se s příslušnými N / O body.
Stručně řečeno, při aktivaci N / O kontakt přijme kladné napájení, a proto nás zajímá toto kladné napájení z N / O kontaktů, protože tyto budou aktivovány pouze při aktivaci relé, což znamená, že když je Tx (vysílač ) jsou stisknuta tlačítka.
Proto musí být všechny příslušné vývody N / O připojeny k zeleným vodičům výše uvedeného obvodu budiče relé.
Jakmile je toto provedeno, bude Rx integrován s modulem reléového ovladače pro provádění všech zamýšlených manévrů dálkově ovládaného vozíku, tj. Vpřed, vzad, pohyby a otáčení vlevo, vpravo.
Napájení desky řidiče relé
Vzhledem k tomu, že relé ve fázi budiče relé by byla zodpovědná za pohyb těžkých motorů spojených s pojezdovým kolem, napájení pro toto by muselo být ekvivalentně silné, proto se pro tuto aplikaci ideálně hodí olověné akumulátory s hlubokým cyklem.
Za předpokladu, že motory mají jmenovitou hodnotu 12V, by olověný akumulátor o kapacitě 40 Ah byl dost dobrý na to, aby se vozík mohl pohybovat i při větším zatížení.
Konfigurace kol s motory pro zamýšlené manévry
Jak může být identifikováno na následujícím obrázku, diskutovaný dálkově ovládaný vozík bude vyžadovat 4 kola pro dopravu a odvalení systému.
Za umožnění zamýšleného zpětného, dopředného, pravého a levého manévru by však byla zodpovědná pouze přední dvě kola, a proto by bylo nutné, aby byly motory upnuty těmito dvěma předními koly vozíku, jak je znázorněno na následujícím obrázku:

Konfigurace připojení trolejového kola
Zadní kola jsou pouze figuríny, které jsou upevněny pouze pro umožnění volného pohybu vozíku v reakci na příkazy předních kol.
Jak lze vidět na výše uvedeném obrázku, modul označený jako sestava PCB je deska ovladače relé, vzdálený modul označuje desku dálkového přijímače Rx, zatímco baterie je baterie 40 AH 12V, o které jsme diskutovali v předchozí části článku.
Po sestavení bude možná nutné vyladit a zkontrolovat připojení vodičů motoru k desce budiče relé.
Pro pohyb vpřed a vzad musí být oba motory navzájem synchronizovány, na druhou stranu pro provedení pravého nebo levého převrácení musí motory projít opačným rotačním pohybem.
Pokud zjistíte, že se motor nechová výše uvedeným způsobem, může to být pravděpodobně napraveno pouhou záměnou polarity jednoho z motorů. To okamžitě napraví situaci a donutí motory provést stanovené manévry.
Nakonec mohou být tlačítka A. B, C, D vhodně přiřazena nebo zaměněna pro kterýkoli z příslušných manévrů vyladěním zelených drátových spojů s modulem Rx podle osobních preferencí uživatelů.
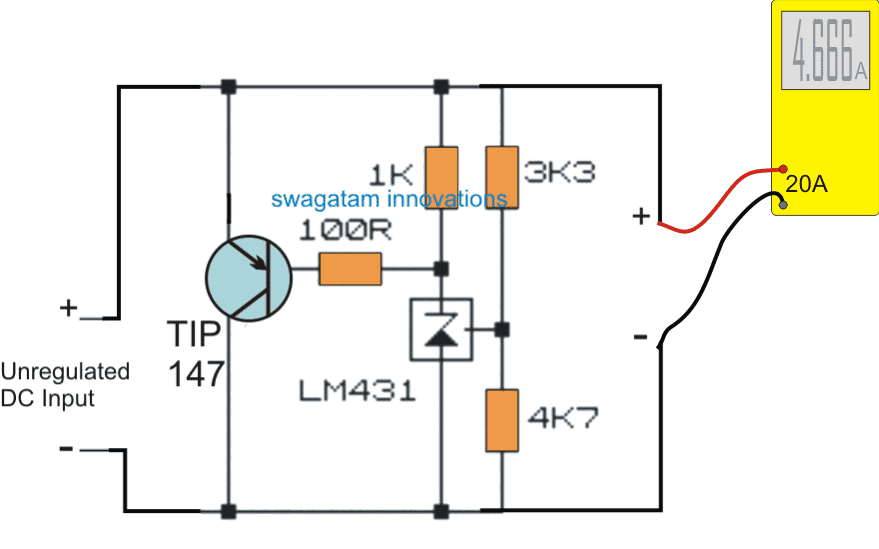
Předchozí: Jak upravit SMPS pro nastavitelný proudový a napěťový výstup Další: Mikrovlnný senzor nebo obvod dopplerovského senzoru