V tomto příspěvku zkoumáme, co je motor BLDC, a následně se učíme, co se týče návrhu obvodu snímače motoru BLDC bez senzoru.
BLDC CPU Fanoušci
Viděli jste ty rychle se pohybující ventilátory v CPU, stabilizátorech napětí, DVD přehrávačích a dalších podobných zařízeních, které pracují s maximální efektivitou, spotřebovávají minimální prostor, proud a přesto jsou schopny provádět důležité operace, jak je stanoveno pro konkrétní zařízení?
Ano, to jsou všechny moderní verze ventilátorů BLDC nebo stejnosměrné motory bez střídavého proudu, které jsou mnohem lepší než staré tradiční kartáčované motory.

Obrázek se svolením: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Motor BLDC však bude vyžadovat sofistikovaný obvod ovladače a ano, všechny tyto ventilátory CPU obsahují tyto moduly ovladače zabudované, i když se zdají být snadno ovladatelné pomocí běžného stejnosměrného proudu, systém je již vybaven inteligentním obvodem.
Ovladač motoru BLDC
Zde se dozvíme o jednom takovém inteligentním obvodu ovladače motoru BLDC, který používá jeden čip DRV10963 k řízení jakéhokoli malého motoru BLDC s neuvěřitelnou účinností, a později v jednom z připravovaných článků uvidíme, jak může být tento obvod IC upgradován pro řízení i výkonné vysoce aktuální BLDC, jako jsou ty, které jsou používá se v kvadrokoptérách.
Ale předtím by bylo zajímavé dozvědět se něco o motorech BLDC.
Rozdíl mezi kartáčovanými a střídavými stejnosměrnými motory
Rozdíl mezi kartáčovaným motorem a bezkartáčovým motorem a míra účinnosti je poměrně zřejmý.
Vzhledem k tomu, že kartáčované motory mají samotnou vinutou armaturu pohybující se mezi magnety, musí používat „kartáče“ (třecí kontakty), aby svorky pohyblivé cívky byly schopny trvale přijímat napájecí napětí, aniž by se musely samy dostat k napájecímu zdroji, což by jinak způsobilo nemožné a ohrozit provoz.
V střídavém motoru se cívka nebo vinutí nikdy nepohybuje a je konstantní, zde rotor nese sadu permanentních magnetů a otáčí se vlivem magnetických toků okolního vinutí.
Vzhledem k tomu, že magnet neobsahuje žádné potíže a je schopen pracovat bez zapojení terminálů pro správu nebo příjem energie, může to probíhat bez námahy, točí se vysokou rychlostí a prakticky na bezhlučné úrovni.
Ale tady je háček. Aby elektromagnet reagoval na toky permanentního magnetu, musí existovat neustálý posun magnetické fáze nebo pólů, aby oba protějšky byli schopni neustále reagovat a procházet protilehlou silou, čímž uvolňují požadovanou torzní sílu přes rotor a proveďte rotaci s výsledným točivým momentem.
U kartáčovaného motoru je to snazší díky samočinně nastavitelné povaze cívky kotvy, která je schopna otáčet se a vytvářet samonosnou protichůdnou magnetickou sílu a udržovat otáčení bez nutnosti jakýchkoli externích pulzů nebo zpracování.
V BLDC se to však stává problémem, protože rotor magnetu zůstává „bezradný“ a vyžaduje vypočítaný magnetický povel z vinutí, aby se mohl smysluplně otáčet a ne nahodile.
To je přesně důvod, proč všechny motory BLDC povinně vyžadují obvod ovladače motoru pro ovládání tří odlišných sad vinutí uvnitř motoru.
Všechny BLDC jsou tedy v zásadě třífázové motory a pro výrobu točivého momentu na rotoru nutně vyžadují 3 fáze.
Co dělají bezsenzorové ovladače BLDC
Obvod budiče BLDC bez senzoru jednoduše elektrifikuje 3 sady vinutí sekvenčním způsobem tak, že magnetický rotor je schopen projít konzistentní protichůdnou silou, což umožňuje motoru dosáhnout trvalého točivého momentu a rotační síly.
Toto sekvenční napájení vinutí BLDC obvodem však nelze nastavit jen tak náhodně, musí být v tandemu nebo v reakci na rotační polohu magnetu rotoru, jinak by implementace mohla zhatit drát a můžeme být svědky hřídele motoru (rotor ) rotující nahodile, to je trhání ve směru hodinových ručiček a proti směru hodinových ručiček bez rozumného otáčení.
Proč se senzory používají v motorech BLDC
Proto představujeme senzory umístěné uvnitř mnoha variant motoru BLDC, tyto senzory (typicky senzory Hallova jevu) „rozumějí“ měnící se poloze magnetických pólů magnetu rotoru, dávají pokyn připojenému obvodu procesoru, aby elektrifikoval odpovídající vinutí a provedl rotační pohyb s optimálním točivým momentem.
Senzory Hallova jevu se účinně používají ve většině motorů BLDC, které jsou relativně větší, ale u menších motorů, jako jsou ventilátory CPU, jednotky CPU, DVD přehrávače, malé ventilátory, u motorů používaných v kvadrokoptérách se senzory Hallova jevu mohou stát nevhodnými a proto je implementován alternativní přístup bez senzoru.
To zahrnuje využití inherentní zpětné EMF elektřiny vinutí, která je brána jako referenční zdroj pro zpracování a elektrizaci příslušných sad vinutí a provádění točivého momentu.

Simulace pohybu rotoru BLDC
Ve výše uvedené surové simulaci můžeme vizualizovat, jak se uvolněný zpět EMF bere jako reference a používá se k výrobě sekvenčních pulzů pro následující sady vinutí, čímž se uloží rotační točivý moment na centrální rotor s permanentním magnetem. Simulace nemusí být přesnou replikací, přesto poskytuje přibližnou představu o principu fungování.
Je zajímavé si všimnout, že puls se přepíná, když je N / S magnetu přesně ve středu jádra vinutí, což umožňuje vinutí buď napájet jako N nebo S v závislosti na polaritě pulzu a vytvářet přitahující a odpuzující síla na N / S magnety, čímž se generuje požadovaný točivý moment na maximální možné úrovni.
A to je zase možné díky zpětnému EMF uvolněnému přepnutím předchozího vinutí.
Výše uvedená diskuse objasňuje fungování motoru BLDC bez snímače, nyní se naučíme, jak specifikovaný obvod zpracovává výše uvedené komplexní provedení třífázového spínání
Ovladač BLDC DRV10963
Po nějakém Googlingu jsem našel tento bezsenzorový obvod ovladače BLDC pomocí jediného čipu DRV10963, který v konfiguraci využívá zanedbatelné množství dílů a přesto je schopen implementovat sofistikované zpracování pro zamýšlené akce.
DRV10963 je nejmodernější čip, který je speciálně navržen pro provoz BLDC motorů bez senzoru pouze předvídáním zpětného EMF z vinutí motoru a poskytováním přesného povelu nad vinutím a dosahováním optimálního točivého momentu přes rotor.
Kruhový diagram

Výše uvedený obrázek ukazuje jednoduché rozložení obvodu, který zjevně neobsahuje nic jiného než samotný IC.
Různé pinouty jsou přiděleny pro provádění specifikovaných funkcí, jako je PWM řízení otáček motoru, řízení směru atd., Jednoduchým napájením příslušných pinoutů zadanými daty z externího zdroje.
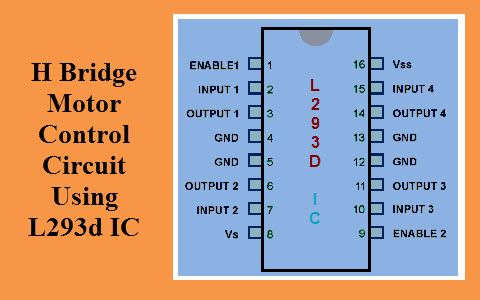
Následující obrázek ukazuje balíček čipu, který vypadá jako 10kolíkový DIL IC, jeho různé funkce pinout lze studovat z údajů uvedených v diagramu:

S odkazem na schéma zapojení navrhovaného obvodu snímače BLDC bez snímače jak je uvedeno v předchozím článku a také na čipovém obrázku výše, podrobnosti o vývodech lze chápat takto:
Podrobnosti IC Pinout
FG = Jedná se o kolík indikátoru otáček motoru (výstup), který je vybaven v režimu otevřeného kolektoru s interním BJT.
Otevřený kolektor znamená, že výstup v tomto pinoutu bude produkovat záporné PWM prostřednictvím potápěčské logiky přes otevřený kolektor a zem, takže pro získání platného čtení bude uživatel muset připojit pull up rezistor přes tento otevřený kolektor a kladné napájení (5 V ) pro dosažení indikace rychlosti v tomto pinoutu.
FGS = Je to vstup voliče indikátoru rychlosti, což znamená, že zde může být zavedena logická hodnota vysoká nebo nízká pro zapnutí / vypnutí indikátoru FG.
Vcc = Kladné napájení IC pro umožnění jeho provozu nesmí překročit 5V.
W, U a V jsou 3fázové výstupy pro motor BLDC, který má být provozován prostřednictvím tohoto integrovaného obvodu. To také funguje jako vstupy pro snímání pulzů EMF motoru pro požadované synchronizované spínání motorových cívek.
GND = Odkazuje na záporný vývod napájení IC vzhledem k kolíku Vdd.
FR = Pomáhá vybírat nebo ovládat směr motoru a lze jej dynamicky měnit kdykoli, když je systém napájen, jednoduše zavedením externí logické výšky nebo logické nízké hodnoty.
PWM = Znamená PWM řídicí vstup z externí generátor křivek PWM.
Tento PWM vstup může být variabilní pro implementaci požadovaného řízení otáček připojeného BLDC motoru.
Tečkovaný prostor ve středu čipu označuje tepelnou podložku, kterou lze upnout nebo přitlačit chladičem, aby se potopila možná tvorba tepla na čipu při jeho použití s nabitým motorem BLDC.
Výše uvedená diskuse uvádí pinout nebo podrobnosti připojení bezsenzorového čipu ovladače BLDC motoru DRV10963, nyní pojďme podrobně analyzovat vnitřní konfiguraci a fungování čipu pomocí následujících bodů:
Popis zařízení
DRV10963 je třífázový bezsenzorový operátor elektromotoru s vestavěnými výkonovými MOSFETy (3fázový H-přemostěný). Je šitý na míru pro vyšší produktivitu, sníženou hlučnost a minimální počet sekundárních funkcí pohonu motoru. Exkluzivní bezsenzorové okno-Iess 180 ° sinusové schéma řízení poskytuje bezhlučnou účinnost dojíždění motoru.
Model DRV10963, který je tvořen funkcí detekce inteligentního zámku, společně s doplňkovými integrovanými bezpečnostními obvody pro dosažení zabezpečeného výkonu. DRV10963 lze nalézt v tepelně účinném 10kolíkovém balení USON s nekrytou tepelnou podložkou.
Jak IC funguje
Produkt DRV10963 je třífázový bezsenzorový operátor motoru s napájenými MOSFETy, to je
vytvořen speciálně pro špičkový výkon, sníženou rezonanci a minimální počet funkcí pohonu motoru s povrchovým počtem.
Hlavní bezsenzorový plán bezskříňového 180 ° sinusového řízení představuje bezhlučné fungování motoru tím, že udržuje elektricky stimulované zvlnění momentu nominální. Po inicializaci zařízení DRV10963 bude otáčet motor v kurzu určeném vstupním pinem FR.
Čip DRV10963 bude fungovat s 3fázovým BLDC motorem využívajícím sinusový řídicí plán.
Význam použitých sinusových fázových napětí závisí na pracovním cyklu kolíku PWM. Zatímco se motor pohybuje, DRV10963 IC poskytuje údaje o rychlosti na kolíku FG.
Jednotka DRV10963 se skládá z funkce snímání inteligentního zámku. V případě, jako je případ, kdy je motor omráčen cizím tlakem, program identifikuje problém se zamykáním a sám přijme opatření k zajištění spolu s motorem.
Konkrétní postup obvodu snímání zámku je podrobně popsán v části Detekce zámku. DRV10963 IC dále obsahuje několik zabudovaných bezpečnostních obvodů, například nadproudovou ochranu, přepěťovou ochranu, podpěťovou ochranu a ochranu proti přehřátí.
Charakteristické vysvětlení
Vstup a ovládání rychlosti
DRV10963 představuje 3fázové 25-kl-lz PWM výstupy, které mohou mít standardní procento sinusových průběhů z fáze na fázi. V případě, že je stanoven jakýkoli cyklus s ohledem na zem, detekovaný tvar vlny bude pravděpodobně sinusoidem chráněným PWM v kombinaci s harmonickými 3. řádu, jak je znázorněno na obrázku 2.

Tato strategie kódování zjednodušuje specifikace ovladačů z toho důvodu, že pravděpodobně často existuje jednofázový výstup, který by mohl být na stejné úrovni jako nula.
Amplituda výsledku se mění podle napájecího napětí (VCC) a nařízeného pracovního cyklu PWM (PWM), jak je definováno v rovnici 1 a zvýrazněno na obrázku 3. Optimální amplituda je implementována, jakmile je instrukční pracovní cyklus PWC 100 PERCENT.
Vphpk = PWMdc>

Otáčky motoru nejsou regulovány přímo pomocí PWM, aby se regulovala amplituda fázových napětí, která se pro motor používají.
Pracovní cyklus vstupu PWM je upraven na 9bitovou digitální veličinu (od 0 do 511).
Rozlišení regulace je 1/512 == 0,2%. Analyzátor pracovního cyklu usnadňuje počáteční operaci výměny příkazů mezi vstupním pracovním cyklem a 9bitovým digitálním číslem.
To je zvýrazněno na obrázku 4, kde r = 80 ms.

Výměnný výkon mezi PWM objednaným pracovním cyklem a maximální výstupní amplitudou je u zařízení DRV10963 proměnlivý.
Výsledná maximální amplituda je diskutována rovnicí 1, když příkaz PWM> minimální funkční pracovní cyklus. Nejnižší pracovní cyklus se často nastavuje na 13%, 10%, 5% nebo bez omezení OTP nastavením (MINOP_DC1: 0).
Tabulka 1 ukazuje doporučené konfigurace pro minimální pracovní cyklus.
Kdykoli je pracovní cyklus podle pokynů PWM menší než nejnižší funkční pracovní cyklus a více než 1,5%, bude výstup regulován při minimálním pracovním cyklu. Kdykoli je vstupní pracovní cyklus pod 1,5%, zařízení DRV10963 pravděpodobně nespustí výstup a je odesláno do pohotovostního režimu.
To lze ilustrovat na obrázku 6.

Rotační konfigurace
DRV10963 spustí motor pomocí techniky, která je podrobně popsána na obrázku 7.

Inicializační graf motoru se skládá z konfigurovatelných alternativ zařízení pro mezní hodnotu pro přepnutí otevřené smyčky na zavírací smyčku (JAK), čas zarovnání (TAHQH) a rychlost zrychlení (RACE).
Za účelem seřazení rotoru do komutační logiky provede DRV10963 x% pracovní cyklus ve fázích V a W současně s řízením fáze U při GND.
Tento scénář je zachován po dobu TAIign sekund. Význam x% je identifikován napětím VCC (jak je uvedeno v tabulce 2), aby se udržel dostatečný točivý moment na různých napájecích napětích.
Jak je dosaženo sekvence zarovnání, motor je nucen zrychlit uvedením napětí sinusových fází se špičkovými úrovněmi, jak je znázorněno v tabulce 2, a posilováním pomocí rozsahu komutace s rozšiřující se rychlostí představovanou RACE, dokud úroveň komutace nezvýší na Hom ., Hz.
Jakmile je tento limit dosažen, převodník DRV’l0963 se převede do režimu uzavřené smyčky, přičemž postup komutačního pohonu je rozpoznán vestavěným řídicím algoritmem, zatímco použité napětí je identifikováno vstupem pracovního cyklu nařízeným PWM.
Limit pro přepnutí otevřené smyčky k zavření smyčky (Hom), čas zarovnání (TAHQH) a rychlost zrychlení (RACE) lze konfigurovat prostřednictvím konfigurací OTP.
Výběr předávacího limitu (HOW,) se obvykle schvaluje hodnocením pokusů a omylů. Cílem by bylo upřednostnit toleranci předání, která by mohla být co možná nejmenší a umožnila motoru bez námahy a věrně přepínat mezi zrychlením v otevřené smyčce a zrychlením v uzavřené smyčce.
Běžně motory se zvýšenými otáčkami (maximální otáčky) vyžadují vynikající toleranci předání kvůli skutečnosti, že motory se zvýšenými otáčkami obsahují sníženou Kt, a proto dostupnější BEMF.
Tabulka 3 ukazuje konfigurovatelné předvolby tolerance předání. Nejvyšší rychlost v elektrické Hz se osvědčila jako reference, která pomáhá při výběru požadované rychlosti předání pro konkrétní podání.

Volba času zarovnání (TAHQH) a rychlosti zrychlení (RACE) může být dokonce podmíněna zkouškou pokusem a omylem.
Motory s větší setrvačností obvykle vyžadují delší dobu seřízení a pomalejší rychlost zrychlení na rozdíl od motorů s nízkou setrvačností, které obvykle vyžadují kratší dobu seřízení spolu s rychlejším procentem zrychlení. Je třeba implementovat kompromisy programu, aby se využila stabilita spuštění, na rozdíl od období rotace nahoru.
TI souhlasí, počínaje rozhodnutím o méně intenzivních konfiguracích (pomalejší RACE a významný Tmign), které by zkrátily dobu zvyšování točivého momentu na podporu maximální míry plnění.
Jakmile je potvrzeno, že zařízení pracuje svědomitě, lze použít mimořádně silné konfigurace (větší RACC a menší TAHQH) ke snížení momentu zapnutí a zároveň k opatrnému sledování míry plnění.
Tabulka 4 uvádí konfigurovatelné nastavení pro TA'g ,, a RACE.

Zbývající část vysvětlení týkající se tohoto bezsenzorového BLDC IC je poskytnuta v tomto původním datovém listu
Neváhejte komentovat a dozvíte se více o výše diskutovaných detailech obvodu ovladače motoru BLDC bez senzoru
Předchozí: Napájecí obvod 12V LED batohu Další: Obvod dálkového ovládání kvadrokoptéry bez MCU