A servomotor nebo servo je jeden typ elektrického motoru, který se používá k otáčení součástí stroje s vysokou přesností. Tento motor obsahuje řídicí obvod, který poskytuje zpětnou vazbu o aktuálním umístění hřídele motoru, takže tato zpětná vazba jednoduše umožňuje těmto motorům otáčet se s vysokou přesností. Servomotor je výhodný při otáčení objektu v určité vzdálenosti nebo úhlu. Tento motor je rozdělen do dvou typů AC servomotor a DC servomotor. Pokud servomotor používá k práci stejnosměrné napájení, pak se motor nazývá stejnosměrný servomotor, zatímco pokud pracuje se střídavým napájením, pak se nazývá střídavý servomotor. Tento tutoriál poskytuje stručné informace o Stejnosměrný servomotor – práce s aplikacemi.
Co je DC servomotor?
Servomotor, který využívá stejnosměrný elektrický vstup k produkci mechanického výstupu, jako je poloha, rychlost nebo zrychlení, se nazývá stejnosměrný servomotor Obecně se tyto typy motorů používají jako hlavní pohony v numericky řízených strojích, počítačích a mnoha dalších všude tam, kde se provádí starty a zastavení. přesně a velmi rychle.

Konstrukce a provoz DC servomotoru
Stejnosměrný servomotor je konstruován s různými součástmi, které jsou uvedeny v následujícím blokovém schématu. V tomto diagramu jsou níže popsány jednotlivé komponenty a jejich funkce.

Motor použitý v tomto je typický stejnosměrný motor včetně jeho budícího vinutí, které je buzeno samostatně. Takže v závislosti na povaze buzení mohou být dále kategorizovány jako servomotory řízené kotvou a servomotory řízené polem.
Zátěž, která se zde používá, je jednoduchý ventilátor nebo průmyslová zátěž, která se jednoduše připojí k mechanické hřídeli motoru.
Převodovka v této konstrukci funguje jako mechanický převodník a mění výkon motoru, jako je zrychlení, poloha nebo rychlost v závislosti na aplikaci.

Hlavní funkcí snímače polohy je získat zpětnovazební signál ekvivalentní aktuální poloze zátěže. Obecně se jedná o potenciometr používaný k poskytování napětí, které je úměrné absolutnímu úhlu hřídele motoru přes převodový mechanismus.
Funkcí komparátoru je porovnat o/p snímače polohy a referenčního bodu, aby se vytvořil chybový signál a předal jej zesilovači. Pokud stejnosměrný motor pracuje s precizním řízením, pak není chyba. Snímač polohy, převodovka a komparátor udělají ze systému uzavřenou smyčku.
Funkce zesilovače je zesílit chybu z komparátoru a přivést ji do stejnosměrného motoru. Funguje tedy jako proporcionální regulátor všude tam, kde je zesílení zesíleno pro nulovou chybu v ustáleném stavu.
Řízený signál dává vstup PWM (pulsně šířkový modulátor) v závislosti na zpětnovazebním signálu, takže moduluje vstup motoru pro přesné řízení, jinak je nulová chyba v ustáleném stavu. Dále tento modulátor šířky pulzu využívá referenční tvar vlny a komparátor k vytváření pulzů.
Vytvořením systému uzavřené smyčky se získá zrychlení, rychlost nebo přesná poloha. Jak název napovídá, servomotor je řízený motor, který poskytuje preferovaný výstup díky efektu zpětné vazby a regulátoru. Chybový signál je jednoduše zesílen a využit k pohonu servomotoru. V závislosti na povaze výroby řídicího signálu a modulátoru šířky pulzu mají tyto motory vynikající způsoby řízení pomocí čipů FPGA nebo digitálních signálových procesorů.
Funkce stejnosměrného servomotoru je; kdykoli je vstupní signál přiveden na stejnosměrný motor, otáčí hřídelí a ozubenými koly. Takže v podstatě je rotace výstupu převodů přiváděna zpět do snímače polohy (potenciometru), jehož knoflíky se otáčejí a mění svůj odpor. Kdykoli se změní odpor, změní se napětí, což je chybový signál, který je přiváděn do regulátoru a následně je generováno PWM.
Chcete-li se dozvědět více o typech stejnosměrných servomotorů, přejděte na tento odkaz: Různé typy servomotorů .
Přenosová funkce DC servomotoru
Přenosovou funkci lze definovat jako poměr Laplaceovy transformace (LT) proměnné o/p k LT ( Laplaceova transformace ) proměnné i/p. Obecně platí, že stejnosměrný motor mění energii z elektrické na mechanickou. Přiváděná elektrická energie na svorkách kotvy se mění na řízenou mechanickou energii.
Funkce přenosu stejnosměrného servomotoru řízené kotvou je znázorněna níže.

θ(s)/Va(s) = (K1/(Js2 + Bs)*(Las + Ra)) /1 + (K1KbKs)/(Js2 + Bs)*(Las+Ra)
Přenosová funkce stejnosměrného servomotoru řízená polem je uvedena níže.

θ(s)/Vf (s) = Kf / (sLf + Rf) * (s2J + Bs)
Stejnosměrný servomotor řízený kotvou poskytuje vynikající výkon díky systému uzavřené smyčky ve srovnání se stejnosměrným servomotorem řízeným polem, což je systém s otevřenou smyčkou. Kromě toho je rychlost odezvy v rámci systému řízení pole pomalá. V případě ovládání kotvou je indukčnost kotvy zanedbatelná, zatímco v případě ovládání polem není stejná. Ale u regulace Infield není vylepšeného tlumení dosažitelné, zatímco u regulace kotvy jej lze dosáhnout.
Specifikace
Stejnosměrný servomotor poskytuje výkonové specifikace, které zahrnují následující. Tyto specifikace by měly být přizpůsobeny na základě potřeb zatížení aplikace, aby bylo možné správně dimenzovat motor.
- Rychlost hřídele jednoduše definuje rychlost, při které se hřídel otáčí, vyjádřenou v otáčkách za minutu (otáčky za minutu).
- Obvykle jsou otáčky nabízené výrobcem otáčky naprázdno ot/p hřídele nebo otáčky, při kterých je výstupní moment motoru nulový.
- Svorkové napětí je návrhové napětí motoru, které určuje otáčky motoru. Tato rychlost se jednoduše ovládá zvýšením nebo snížením přiváděného napětí do motoru.
- Točivý moment podobný rotační síle je generován hřídelí stejnosměrného servomotoru. Požadovaný krouticí moment pro tento motor je tedy jednoduše určen charakteristikami rychlosti a krouticího momentu různých zátěží v cílové aplikaci. Tyto momenty jsou dva typy počátečního momentu a trvalého momentu.
- Spouštěcí moment je požadovaný moment při spouštění servomotoru. Tento točivý moment je normálně vyšší ve srovnání s trvalým točivým momentem.
- Trvalý točivý moment je výstupní točivý moment, který je kapacitou motoru při konstantních provozních podmínkách.
- Tyto motory musí mít dostatečnou kapacitu otáček a točivého momentu pro danou aplikaci, včetně 20 až 30% rezervy mezi nezbytnou zátěží a jmenovitými hodnotami motoru, aby byla zajištěna spolehlivost. Když tyto marže překročí příliš mnoho, sníží se efektivita nákladů specifikace 12V DC Coreless DC Servo Motor od Faulhaber jsou:
- Poměr převodovky je 64:l Planetární třístupňová převodovka.
- Zatěžovací proud je 1400 mA Výkon.
- Výkon je 17W.
- Rychlost je 120 ot./min.
- Proud bez zátěže je 75 mA.
- Typ kodéru je optický.
- Rozlišení kodéru je 768CPR O/P hřídele.
- Průměr je 30mm.
- Délka je 42 mm.
- Celková délka je 85 mm.
- Průměr hřídele je 6 mm.
- Délka čepele je 35 mm.
- Kroutící moment stáje je 52 kg cm.
Charakteristika
The vlastnosti stejnosměrného servomotoru zahrnout následující.
- Konstrukce DC servomotoru je podobná jako u stejnosměrného motoru s permanentním magnetem nebo samostatně buzeného stejnosměrného motoru.
- Řízení rychlosti tohoto motoru se provádí řízením napětí kotvy.
- Servomotor je navržen s vysokým odporem kotvy.
- Poskytuje rychlou odezvu točivého momentu.
- Skoková změna napětí kotvy generuje rychlou změnu rychlosti motoru.
Střídavý servomotor versus stejnosměrný servomotor
Rozdíl mezi stejnosměrným servomotorem a střídavým servomotorem zahrnuje následující.
|
Střídavý servomotor |
Stejnosměrný servomotor |
| Jeden druh servomotoru, který využívá střídavý elektrický vstup ke generování mechanického výstupu, se nazývá střídavý servomotor. | Jeden druh servomotoru, který využívá stejnosměrný elektrický vstup ke generování mechanického výstupu, se nazývá stejnosměrný servomotor. |
| Střídavý servomotor poskytuje nízký výstupní výkon. | Stejnosměrný servomotor poskytuje vysoký výstupní výkon. |
| Tyto motory jsou nastavitelné pro vysokorychlostní provozní podmínky. | Tyto motory jsou nastavitelné pro provozní podmínky při nízkých otáčkách. |
| Tyto typy motorů vyvíjejí vysoký točivý moment. | Tyto typy motorů vyvíjejí nízký točivý moment. |
| Provoz tohoto motoru je stabilní, plynulý a méně hlučný. | Provoz tohoto motoru je méně stabilní a hlučný. |
| Tyto motory mají nižší účinnost. | Tyto motory mají vysokou účinnost. |
| Tyto motory mají méně problémů se stabilitou. | Tyto motory mají větší problémy se stabilitou. |
| U těchto motorů není problém s elektronickým šumem. | U těchto motorů je problém s elektronickým šumem kvůli přítomnosti kartáčů. |
| Údržba těchto motorů je menší. | Údržba těchto motorů je náročná kvůli přítomnosti kartáčů a komutátoru. |
| Jsou lehké a v malých velikostech. | Jsou těžké a ve velkých rozměrech. |
| Tyto motory jsou vhodné pro aplikace s nízkým výkonem. | Tyto motory jsou vhodné pro aplikace s vysokým výkonem. |
Propojení DC servomotoru s Arduino
Pro ovládání stejnosměrného servomotoru v přesném a požadovaném úhlu lze použít desku Arduino / jakýkoli jiný mikrokontrolér. Tato deska má analogový o/p, který generuje PWM signál pro otočení servomotoru pod přesným úhlem. Úhlovou polohu servomotoru můžete také posunout potenciometrem nebo tlačítky pomocí Arduina.
Servomotor lze také ovládat pomocí IR dálkového ovládání, které je snadno dostupné. Toto dálkové ovládání je užitečné při posouvání stejnosměrného servomotoru do určitého úhlu nebo při lineárním zvyšování nebo snižování úhlu motoru pomocí IR dálkového ovladače.
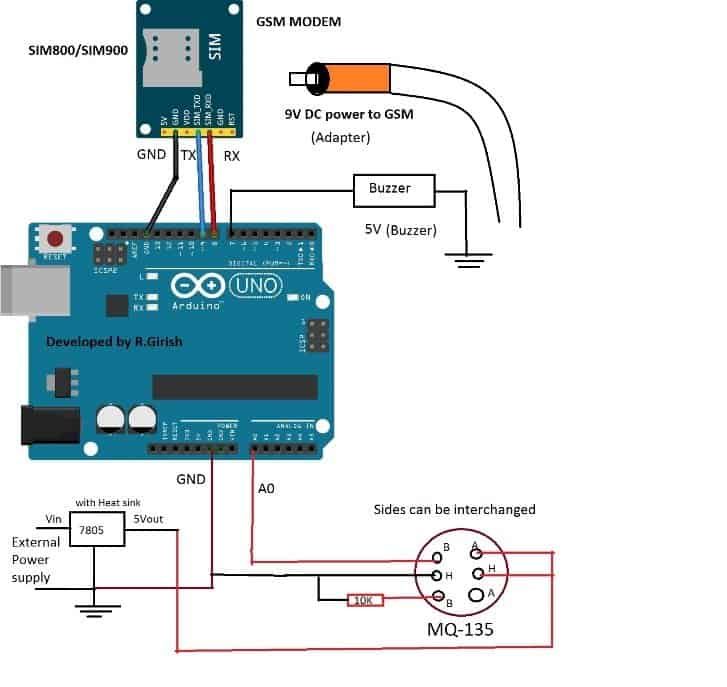
Zde budeme diskutovat o tom, jak pohybovat servomotorem pomocí IR dálkového ovládání pomocí Arduina pod určitým úhlem a také zvětšovat nebo zmenšovat úhel servomotoru s dálkovým ovladačem ve směru a proti směru hodinových ručiček. Schéma propojení stejnosměrného servomotoru s Arduino a IR dálkovým ovladačem je uvedeno níže. Spojení tohoto rozhraní následují takto;

Toto rozhraní používá hlavně tři základní komponenty, jako je stejnosměrný servomotor, deska Arduino a IR senzor TSOP1738. Tento snímač má tři svorky jako Vcc, GND a výstup. Svorka Vcc tohoto snímače je připojena k 5V desky Arduino Uno, svorka GND tohoto snímače je připojena ke svorce GND desky Arduino a výstupní svorka je připojena ke kolíku 12 (digitální vstup) desky Arduino.
Digitální výstupní kolík 5 je jednoduše připojen ke vstupnímu signálu signálu servomotoru pro pohon motoru
Kladný kolík stejnosměrného servomotoru je přiveden k externímu napájení 5V a kolík GND servomotoru je přiveden na kolík GND Arduina.
Pracovní
IR dálkový ovladač se používá k provedení dvou akcí 30 stupňů, 60 stupňů a 90 stupňů a také ke zvýšení/snížení úhlu motoru od 0 do 180 stupňů.
Dálkové ovládání obsahuje mnoho tlačítek, jako jsou číselná tlačítka (0-9), tlačítka pro ovládání úhlu, tlačítka se šipkami, tlačítka nahoru/dolů atd. Jakmile je stisknuto libovolné číselné tlačítko od 1 do 5, stejnosměrný servomotor se přesune na toto tlačítko. přesný úhel a po stisknutí tlačítka úhlu nahoru/dolů lze úhel motoru přesně nastavit na ±5 stupňů.
Jakmile je o tlačítkách rozhodnuto, je třeba kódy těchto tlačítek dekódovat. Po stisknutí libovolného tlačítka na dálkovém ovladači odešle jeden kód k provedení požadované akce. K dekódování těchto vzdálených kódů se používá IR vzdálená knihovna z internetu.
Nahrajte následující program do Arduina a připojte IR senzor. Nyní umístěte dálkový ovladač směrem k IR senzoru a stiskněte tlačítko. Poté otevřete sériový monitor a sledujte kód stisknutého tlačítka ve formě čísel.
Arduino kód
#include
#include
Servisní služba1;
int IRpin = 12; // pin pro IR senzor
int úhel_motoru=0;
IRrecv irecv(IRpin);
výsledky decode_results;
void setup()
{
Serial.begin(9600); // inicializuje sériovou komunikaci
Serial.println(“IR dálkově ovládaný servomotor”); // zobrazení zprávy
irecv.enableIRIn(); // Spusťte přijímač
servo1.attach(5); // deklarace pinu servomotoru
servo1.write(úhel_motoru); // pohyb motoru na 0 st
Serial.println(“Úhel servomotoru 0 stupňů”);
zpoždění (2000);
}
void loop()
{
while(!(irrecv.decode(&results))); // počkejte, dokud nebude stisknuto žádné tlačítko
if (irrecv.decode(&results)) // po stisknutí tlačítka a přijetí kódu
{
if(results.value==2210) // zkontrolujte, zda je stisknuto tlačítko číslice 1
{
Serial.println(“úhel servomotoru 30 stupňů”);
úhel_motoru = 30;
servo1.write(úhel_motoru); // posuňte motor na 30 st
}
else if(results.value==6308) // pokud je stisknuto tlačítko číslice 2
{
Serial.println(“úhel servomotoru 60 stupňů”);
úhel_motoru = 60;
servo1.write(úhel_motoru); // posuňte motor na 60 stupňů
}
else if(results.value==2215) // stejně jako u všech číselných tlačítek
{
Serial.println(“úhel servomotoru 90 stupňů”);
úhel_motoru = 90;
servo1.write(úhel_motoru);
}
else if(results.value==6312)
{
Serial.println(“úhel servomotoru 120 stupňů”);
úhel_motoru = 120;
servo1.write(úhel_motoru);
}
else if(results.value==2219)
{
Serial.println(“úhel servomotoru 150 stupňů”);
úhel_motoru = 150;
servo1.write(úhel_motoru);
}
else if(results.value==6338) // pokud je stisknuto tlačítko ZVÝŠENÍ hlasitosti
{
if(uhel_motoru<150) úhel_motoru+=5; // zvětšit úhel motoru
Serial.print(“Úhel motoru je “);
Serial.println(úhel_motoru);
servo1.write(úhel_motoru); // a posuňte motor do tohoto úhlu
}
else if(results.value==6292) // pokud je stisknuto tlačítko pro snížení hlasitosti
{
if(úhel_motoru>0) úhel_motoru-=5; // snížení úhlu motoru
Serial.print(“Úhel motoru je “);
Serial.println(úhel_motoru);
servo1.write(úhel_motoru); // a posuňte motor do tohoto úhlu
}
zpoždění(200); // počkejte 0,2 sec
irecv.resume(); // buďte opět připraveni přijmout další kód
}
}
Napájení stejnosměrného servomotoru je dáno z externích 5V & napájení IR senzoru a desky Arduino je dáno z USB. Jakmile je servomotor napájen, posune se na 0 stupňů. Poté se na sériovém monitoru zobrazí zpráva „Úhel servomotoru je 0 stupňů“.
Nyní na dálkovém ovládání, jakmile stisknete tlačítko 1, stejnosměrný servomotor se posune o 30 stupňů. Podobně, jakmile jsou stisknuta tlačítka jako 2, 3, 4 nebo 5, motor se bude pohybovat v požadovaných úhlech, jako je 60 stupňů, 90 stupňů, 120 stupňů nebo 150 stupňů. Nyní sériový monitor zobrazí polohu úhlu servomotoru jako „úhel servomotoru xx stupňů“
Po stisknutí tlačítka pro zvýšení hlasitosti se úhel motoru zvýší o 5 stupňů, což znamená, že pokud je 60 stupňů, posune se na 65 stupňů. Poloha nového úhlu se tedy zobrazí na sériovém monitoru.
Podobně, jakmile je stisknuto tlačítko úhlu dolů, úhel motoru se sníží o 5 stupňů, což znamená, že pokud je úhel 90 stupňů, posune se na 85 stupňů. Signál z IR dálkového ovládání je snímán IR senzorem. Chcete-li vědět, jak to snímá a jak funguje IR senzor, klikněte tady
Poloha nového úhlu se tedy zobrazí na sériovém monitoru. Proto můžeme snadno ovládat úhel stejnosměrného servomotoru pomocí Arduino & IR dálkového ovládání.
Chcete-li vědět, jak propojit DC motor s mikrokontrolérem 8051, klikněte tady
Výhody DC servomotoru
The výhody stejnosměrných servomotorů zahrnout následující.
- Provoz DC servomotoru je stabilní.
- Tyto motory mají mnohem vyšší výstupní výkon, než je velikost a hmotnost motoru.
- Když tyto motory běží při vysokých otáčkách, nevytvářejí žádný hluk.
- Tento chod motoru je bez vibrací a rezonance.
- Tyto typy motorů mají vysoký poměr točivého momentu k setrvačnosti a mohou velmi rychle zachytit zatížení.
- Mají vysokou účinnost.
- Poskytují rychlé odpovědi.
- Tyto jsou přenosné a lehké.
- Je možný provoz čtyř kvadrantů.
- Při vysokých rychlostech jsou slyšitelně tiché.
The nevýhody stejnosměrných servomotorů zahrnout následující.
- Mechanismus chlazení stejnosměrného servomotoru je neefektivní. Takže tento motor se rychle znečišťuje, jakmile je odvětrán.
- Tento motor generuje maximální výstupní výkon při vyšších otáčkách točivého momentu a potřebuje pravidelné převody.
- Tyto motory mohou být poškozeny přetížením.
- Mají složitý design a potřebují kodér.
- Tyto motory potřebují ladění pro stabilizaci zpětnovazební smyčky.
- Vyžaduje údržbu.
Aplikace DC servomotorů
The aplikace stejnosměrných servomotorů zahrnout následující.
- Stejnosměrné servomotory se používají v obráběcích strojích pro řezání a tváření kovů.
- Používají se pro polohování antén, tisk, balení, zpracování dřeva, textilu, výrobu motouzů nebo provazů, CMM (souřadnicové měřicí stroje), manipulaci s materiálem, leštění podlah, otevírání dveří, X-Y stolů, lékařské techniky a předení plátků.
- Tyto motory se používají v systémech řízení letadel, kde prostorová a hmotnostní omezení vyžadují motory, aby dodaly vysoký výkon pro každý objem jednotky.
- Jsou použitelné tam, kde je nutný vysoký startovací moment, jako jsou pohony dmychadel a ventilátory.
- Používají se také především pro robotiku, programovací zařízení, elektromechanické akční členy, obráběcí stroje, procesní regulátory atd.
Toto je tedy přehled stejnosměrného proudu servomotor – funkční s aplikacemi. Tyto servomotory se používají v různých průmyslových odvětvích k řešení mnoha mechanických pohybů. Díky vlastnostem těchto motorů budou velmi účinné a výkonné. Zde je pro vás otázka, co je AC Servo Motor?