V tomto projektu se naučíme, jak vytvořit jednoduchý unipolární obvod budiče krokového motoru pomocí časovače IC 555. Kromě časovače 555 potřebujeme také IC CD 4017, což je IC dekády.
Autor: Ankit Negi
K tomuto obvodu lze připojit jakýkoli unipolární motor pro provádění konkrétního úkolu, i když je nejprve nutné provést malé změny.
Otáčky krokového motoru lze ovládat potenciometrem připojeným mezi výbojem a prahovou hodnotou kolík 555 časovače .
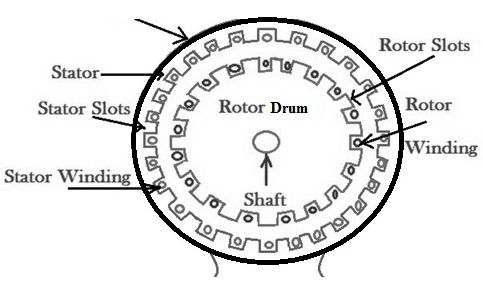
Základy krokového motoru
Krokové motory se používají v oblastech, kde je vyžadováno určité množství otáček, které nelze dosáhnout běžnými stejnosměrnými motory. Typická aplikace krokového motoru je ve 3D TISKÁRNĚ. Najdete dva typy populárních krokových motorů: UNIPOLAR a BIPOLAR.
Jak název napovídá, unipolární krokový motor obsahuje vinutí se společným vodičem, které lze snadno napájet jeden po druhém.
Zatímco bipolární krokový motor nemá společnou svorku mezi cívkami, kvůli které jej nelze pohánět jednoduše pomocí navrhovaného obvodu. Pro pohon bipolárního krokového motoru potřebujeme obvod h-můstku.
KOMPONENTY:
1. IC 555 TIMER

2. CD 4017 IC

3. ODPORY 4,7K, 1K


4. POTENCIOMETR 220K

5. 1 uf KAPACITOR

6. 4 DIODY 1N4007

7. 4 TRANSISTORY 2N2222

8. UNIPOLAR STEPPER MOTOR

9. DC ZDROJ NAPÁJENÍ
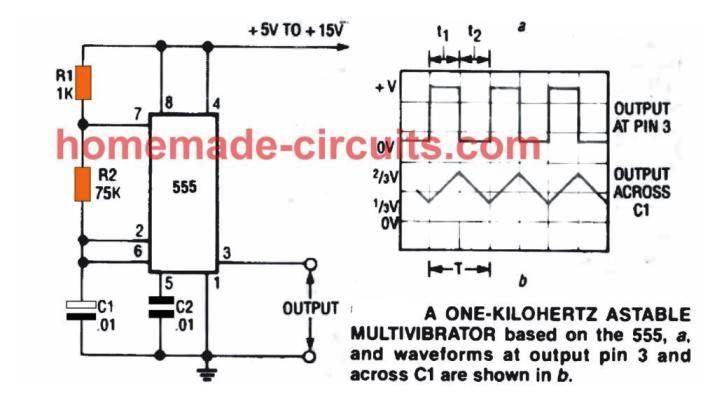
ÚČEL ČASOVAČE 555:
Zde je vyžadován časovač 555 ke generování hodinových pulzů konkrétní frekvence (lze ji měnit pomocí 220k potu), která určuje rychlost krokového motoru.
Podrobnosti IC 555 Pinout

ÚČEL CD4017:
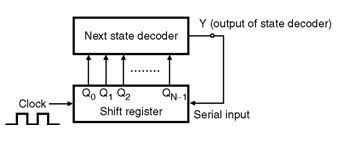
Jak již bylo uvedeno výše, jedná se o dekádní čítač IC, tj. Může počítat až 10 hodinových pulzů. Tento IC je výjimečný tím, že má vlastní vestavěný dekodér. Kvůli tomu nemusíte přidávat další IC k dekódování binárních čísel.
4017 počítá až 10 hodinových pulzů od 555 hodin a poskytuje vysoký výstup odpovídající každému hodinovému pulzu jeden po druhém ze svých 10 výstupních pinů. Najednou je vysoký pouze jeden kolík.
ÚČEL TRANSISTORŮ:
Zde existují dva účely tranzistoru:
1. Tranzistory zde fungují jako spínače, a tak energizují jednu cívku po druhé.
2. Tranzistory umožňují průchod vysokého proudu a poté motoru, čímž zcela vylučují časovač 555, protože může dodávat velmi malé množství proudu.
KRUHOVÝ DIAGRAM:

Proveďte připojení podle obrázku.
1. Připojte kolík 3 nebo výstupní kolík časovače 555 k kolíku 14 (hodinový kolík) IC 4017.
2. Připojte aktivační kolík nebo 13. kolík 4017 k zemi.
3. Připojte kolíky 3,2,4,7 jeden po druhém k tranzistorům 1,2,3,4.
4. Připojte 10. a 15. kolík k zemi pomocí rezistoru 1k.
5. Připojte společný vodič krokového motoru ke kladnému pólu napájení.
6. Připojte další vodiče krokového motoru tak, aby cívky byly napájeny jeden po druhém, aby byla správně dokončena jedna celá otáčka. (Nahlédnout do datového listu motoru poskytnutého výrobcem)
PROČ JE VÝSTUP PIN 10 IC 4017 PŘIPOJEN K JEHO PIN 15 (RESET PIN)?
Jak již bylo uvedeno výše, 4017 počítá hodinové impulsy jeden po druhém až do 10. hodinového impulzu a podle toho poskytuje vysoký výstup na výstupních kolících, každý výstupní kolík jde vysoko.
To způsobuje určité zpoždění otáčení motoru, které není nutné. Protože požadujeme pouze první čtyři kolíky pro jednu úplnou otáčku motoru nebo první čtyři desetinná čísla od o do 3, kolík č. 10 je připojeno k pin15, takže po 4. počítání se IC resetuje a počítání začíná znovu od začátku. Tím není zajištěno žádné přerušení otáčení motoru.
PRACOVNÍ:
Po správném připojení se po zapnutí začne obvodový motor otáčet v krocích. Časovač 555 produkuje hodinové impulsy v závislosti na hodnotách rezistoru, potenciometru a kondenzátoru.
Pokud změníte hodnotu kterékoli z těchto tří složek, frekvence hodinového pulzu se změní.
Tyto hodinové impulsy jsou dány IC CD 4017, který poté počítá hodinové impulsy jeden po druhém a dává 1 jako výstup na kolík č. 3,2,4,7, a opakuje tento proces nepřetržitě.
Vzhledem k tomu, že tranzistor Q1 je připojen ke kolíku 3, zapíná se nejprve tranzistor Q2 a poté Q3 a Q4. Pokud je však jeden tranzistor zapnutý, všechny ostatní zůstanou vypnuté.
Když je Q1 zapnutý, chová se jako sepnutý spínač a proud protéká společným vodičem k vodiči 1 a poté k zemi přes tranzistor Q1.
Toto napájí cívku 1 a motor se otáčí v určitém úhlu, který závisí na frekvenci hodin. Pak se totéž stane s Q2, která napájí cívku 2, následovanou cívkou 3 a cívkou 4. Tak se získá jedna úplná revoluce.
Při otáčení potenciometru:
Řekněme, že počáteční poloha hrnce je taková, že mezi výbojem a prahovým kolíkem je maximální odpor (220k). Vzorec pro frekvenci výstupního taktu je:
F = 1,44 / (R1 + 2R2) C1
Ze vzorce je zřejmé, že frekvence hodinových pulzů klesá s rostoucí hodnotou R2. Když je tedy hodnota R2 nebo potu maximální, frekvence je minimální, kvůli čemuž IC 4017 počítá pomaleji a dává více zpožděného výstupu.
Jak hodnota odporu R2 klesá, frekvence se zvyšuje, což způsobuje minimální zpoždění mezi výstupy IC 4017. A proto se krokový motor otáčí rychleji.
Hodnota potenciometru tedy určuje rychlost krokového motoru.
SIMULAČNÍ VIDEO:
Zde můžete jasně vidět, jak se rychlost motoru mění s odporem R2. Jeho hodnota se nejprve sníží a poté zvýší, což zase nejprve zvýší a poté sníží rychlost krokového motoru.
Předchozí: Jak fungují klikové svítilny Další: Okruh tachometru Arduino pro přesná měření