V několika aplikacích je často nezbytné zabránit spuštění elektrický motor docela rychlý. Víme, že jakýkoli rotační objekt dosahuje kinetické energie (KE). Jak rychle tedy dokážeme nést předmět k rozbití, bude v zásadě záviset na tom, jak rychle dokážeme vytáhnout jeho kinetickou energii. Pokud ukončíme šlapání cyklu, pak se po zastavení určité vzdálenosti nakonec zastaví. Počáteční KE bude uložen a rozptýlí se jako teplo uvnitř odpor cesty. Chcete-li však kolo rychle zastavit, zabrzdí se brzda. Uložená kinetická energie se proto rozptýlí dvěma způsoby, jedním na rozhraní brzdové čelisti kola a druhým na rozhraní silničních komunikací. Je však nutná běžná údržba brzdy. Tento článek pojednává o přehledu dynamického brzdění stejnosměrného motoru a jeho fungování. V zásadě existují tři typy brzdných metod, které se používají u stejnosměrného motoru, jako jsou regenerační, dynamické a připojovací.
Co je dynamické brzdění?
Definice: Dynamické brzdění je známé také jako reostatické brzdění. Tímto způsobem lze obrátit směr točivého momentu pro rozbití motoru. Když je motor v chodu, je odpojen brzděním od zdroje energie a může být připojen přes odpor. Jakmile je motor odpojen od zdroje, rotor se začne otáčet kvůli nečinnosti a funguje jako generátor. Jakmile tedy motor funguje jako generátor, dojde k obrácení toku proudu a točivého momentu. Během brzdění bude řezný odpor vyříznut, aby byl zachován stálý točivý moment.
Dynamické brzdění stejnosměrného motoru
Pokud je elektromotor jednoduše odpojen od zdroje napájení, zastaví se, ale u velkých motorů to bude kvůli delší točivé setrvačnosti trvat déle, protože energie který je uložen, se musí rozpustit během tření ložiska a větru. Tento stav lze zlepšit stisknutím motoru, který bude fungovat jako generátor, pomocí brzdění bude na hřídel vynucen točivý moment opačný k dráze otáčení, což pomůže zařízení rychle přestat fungovat. V průběhu brzdění je časný KE, který je uložen v rotoru, buď rozpustný ve vnějším odporu, jinak je přiváděn zpět do napájení.
Schéma připojení dynamického brzdění stejnosměrného bočníku
Při tomto druhu brzdění stejnosměrný směšovací motor je odpojen od napájení a přes kotvu je připojen brzdný odpor (Rb). Tento motor bude tedy fungovat jako generátor generující brzdný moment.
Během tohoto brzdění tento motor jednou funguje jako generátor , pak se K.E (kinetická energie) bude ukládat v rotačních částech Stejnosměrný motor . Připojená zátěž může být změněna na elektrickou energii. Tato energie se rozptýlí jako teplo v brzdném odporu (Rb) a odporu okruhu kotvy (Ra). Tento druh brzdění je neúčinná metoda brzdění, protože generovaná energie se bude rozptylovat jako teplo v rámci odporů.
Schéma připojení dynamického brzdění stejnosměrného bočníku je uvedeno níže. Z tohoto diagramu lze pochopit způsob brzdění. V následujícím diagramu je přepínač „S“ a DPDT (dvoupólový dvojitý hod) .

Dynamické brzdění stejnosměrného bočníku
U běžné motorické metody je přepínač „S“ připojen do dvou poloh, například 1 a 1 ′. Napájecí napětí včetně polarity a vnějšího odporu (Rb) je připojeno na svorky 2 a 2 '. V motorovém režimu však tato část obvodu zůstává nehybná. Pro zahájení brzdění je spínač vržen ve směru poloh 2 & 2 ′ při t = 0, čímž se odpojí kotva od přívodu levé ruky. Proud kotvy při t = 0+ bude Ia = (Eb + V) / (ra + Rb), protože ‚Eb 'a napájecí napětí z pravé ruky mají díky dobrým vlastnostem spojení konzervační polaritu.

Stroj funguje jako generátor
Zde lze obrátit směr „Ia“ generováním „Te“ v opačném směru směrem k „n“. Jakmile se „Eb“ sníží, „Ia“ se s časem sníží a rychlost se sníží. Ale „Ia“ se nemůže kdykoli změnit na nulu kvůli výskytu napájecího napětí. Tak odlišný od reostatického, bude existovat rozsáhlá velikost brzdného momentu. Proto je zastavení motoru pravděpodobně rychlejší ve srovnání s reostatickým brzděním. Pokud je však spínač „S“ konstantní v polohách 1 ′ a 2 ′ & i po nulové rychlosti, stroj začne sbírat rychlost v opačném směru, aby pracoval jako motor. Je tedy třeba provést údržbu pro odpojení napájení na pravé ruce, a poté se moment rychlosti kotvy stane nulovým.
Výhody nevýhody
Výhody a nevýhody jsou
- Jedná se o velmi používanou metodu, při níž se elektrický motor pracuje jako generátor, jakmile je odpojen od zdroje energie
- Při tomto brzdění se akumulovaná energie rozptýlí odporem brzdění a dalších komponent použitých v obvodu.
- Tím se sníží brzdění komponenty na základě opotřebení třením a regenerace snižuje využití čisté energie.
Aplikace dynamického brzdění
Mezi aplikace patří následující.
- Technika dynamického brzdění se používá k zastavení stejnosměrného motoru a je široce používána v průmyslových aplikacích.
- Tyto systémy se používají v aplikacích ventilátorů, odstředivek, čerpadla , rychlé nebo průběžné brzdění a určité dopravní pásy.
- Používají se tam, kde je vyžadováno rychlé zpomalení a couvání.
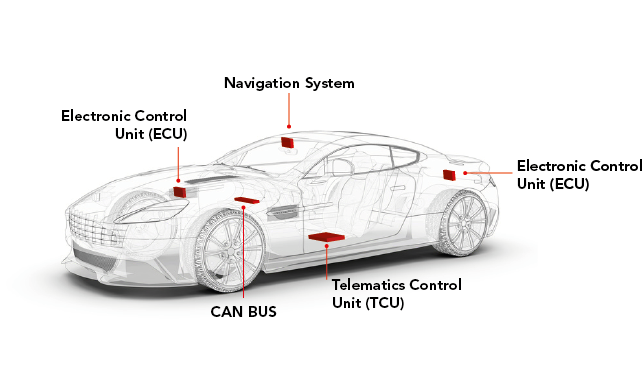
- Používají se na motorových vozech přes několik jednotek, trolejbusů, elektrických tramvají, lehkých kolejových vozidel, hybridních elektrických a elektrických automobilů.
Časté dotazy
1). Jaký je alternativní název DC dynamického brzdění
Je také známý jako reostatické brzdění.
2). Jaké jsou typy brzdění
Jsou regenerační, dynamické a ucpávají se.
3). Co je DBC (dynamické ovládání brzd)?
DBC okamžitě vytváří maximální brzdnou sílu k zastavení vozidla.
4). Jaký je rozdíl mezi dynamickým a regenerativním brzděním?
Energie uložená v rámci dynamického brzdění se rozptýlí během brzdného odporu i dalších součástí v okruhu, zatímco v rekuperaci bude uložená energie odeslána zpět ke zdroji energie, aby ji mohla později znovu použít.
O toto tedy jde přehled dynamického brzdění . Tento systém se používá k obrácení směru točivého momentu a také k rozbití motoru jeho odpojením od zdroje napájení přes odpor. Zde je otázka, jaké jsou různé typy brzdění?