Můžeme pozorovat různé objekty po celém světě. Podobně se používá radarová rádiová detekce a měření vzdálenosti, které pomáhají pilotům při letu v mlze, protože si toho pilot nemůže všimnout, kam cestují. Radar používaný v letadlech je podobný světlu pochodní, které pracuje s radiovými vlnami místo světla. Letoun vysílá blikající radarový signál a naslouchá jakýmkoli náznakům tohoto signálu z blízkých objektů. Jakmile si indikace všimnete, letoun identifikuje, že je něco blízko a použije čas potřebný k indikaci, aby zjistil, jak daleko je. Tento článek pojednává o přehledu radaru a jeho fungování.
Kdo vynalezl radar?
Podobně jako u několika vynálezů není snadné dát radar jednotlivci, protože to byl výsledek dřívější práce na vlastnostech elektromagnetické záření pro přístup k mnoha elektronickým zařízením. Otázka hlavního znepokojení je komplikovanější skrývkou vojenského soukromí, podle kterého byly techniky rádiového umístění zkoumány v různých zemích v počátcích druhé světové války.
Tento autor recenzí nakonec dospěl k závěru, že když je radarový systém jasným případem přímého vytvoření, poznámka Roberta Watsona-Watta o detekci a umístění letadla pomocí Radio Methods byla zveřejněna bezprostředně před 50 lety. Jednalo se tedy o nejvýznamnější osamělou publikaci v této oblasti. Britské úspěchy v boji o Británii hodně přispěly k rozšíření radarového systému, který zahrnoval technický růst s provozní proveditelností.
Co je to radarový systém?
RADAR znamená Detekce rádia a rozsahový systém. Je to v zásadě elektromagnetický systém používaný k detekci polohy a vzdálenosti objektu od bodu, kde je umístěn RADAR. Funguje tak, že vyzařuje energii do prostoru a sleduje ozvěnu nebo odražený signál od objektů. Pracuje v rozsahu UHF a mikrovln.
Radar je elektromagnetický senzor, který se používá k pozorování, sledování, lokalizaci a identifikaci různých objektů, které jsou v určitých vzdálenostech. Práce radaru spočívá v tom, že přenáší elektromagnetickou energii ve směru cílů, aby sledovala ozvěny a vracela se z nich. Cíle zde nejsou nic jiného než lodě, letadla, astronomická tělesa, motorová vozidla, kosmické lodě, déšť, ptáci, hmyz atd. Místo toho, aby si všimli polohy a rychlosti cíle, získává někdy i jejich tvar a velikost.
Hlavním cílem radaru ve srovnání s infračervenými a optickými snímacími zařízeními je objevit vzdálené cíle za obtížných klimatických podmínek a určit jejich vzdálenost, dosah a přesnost. Radar má svůj vlastní vysílač, který je znám jako zdroj osvětlení pro umístění cílů. Obecně to funguje v mikrovlnné oblasti elektromagnetického spektra, které se počítá v hertzích, když se frekvence rozšíří ze 400 MHz na 40 GHz. Základní součásti používané v radaru
Radar prochází rychlým vývojem v letech 1930 až 40, aby splnil požadavky armády. Stále se široce používá prostřednictvím ozbrojených sil, kdekoli došlo k několika technologickým pokrokům. Současně je radar využíván také v civilních aplikacích, zejména při řízení letového provozu, pozorování počasí, navigace lodí, prostředí, snímání ze vzdálených oblastí, pozorování planet, měření rychlosti v průmyslových aplikacích, sledování vesmíru, vymáhání práva atd.
Pracovní princip
The princip fungování radaru je velmi jednoduchý, protože přenáší elektromagnetický výkon a zkoumá energii vrácenou zpět do cíle. Pokud jsou vrácené signály přijímány znovu v poloze jejich zdroje, pak je v přenosu překážka. Toto je pracovní princip radaru.
Základy radaru
Systém RADAR se obecně skládá z vysílače, který produkuje elektromagnetický signál, který je vyzařován do prostoru anténou. Když tento signál udeří na objekt, odrazí se nebo je znovu vyzařován v mnoha směrech. Tento odražený nebo ozvěnový signál je přijímán radarovou anténou, která jej dodává do přijímače, kde je zpracováván k určení geografických statistik objektu.
Rozsah je určen výpočtem času, který signál potřebuje k cestování z RADARU k cíli a zpět. Poloha cíle se měří v úhlu, od směru signálu maximální amplitudové ozvěny, k němuž anténa směřuje. K měření dosahu a umístění pohybujících se objektů se používá Dopplerův efekt.
Mezi základní součásti tohoto systému patří následující.
- Vysílač: Může to být výkonový zesilovač jako Klystron, Traveling Wave Tube nebo výkonový oscilátor jako Magnetron. Signál je nejprve generován pomocí generátoru křivek a poté zesílen v výkonovém zesilovači.
- Vlnovody: Vlnovody jsou přenosová vedení pro přenos signálů RADAR.
- Anténa: Použitou anténou může být parabolický reflektor, planární pole nebo elektronicky řízená fázovaná pole.
- Duplexní jednotka: Duplexor umožňuje použití antény jako vysílače nebo přijímače. Může to být plynné zařízení, které by při práci vysílače způsobilo zkrat na vstupu do přijímače.
- Přijímač: Může to být superheterodynový přijímač nebo jakýkoli jiný přijímač, který se skládá z procesoru pro zpracování signálu a jeho detekci.
- Prahové rozhodnutí: Výstup přijímače je porovnán s prahovou hodnotou pro detekci přítomnosti jakéhokoli objektu. Pokud je výstup pod jakoukoli prahovou hodnotou, předpokládá se přítomnost šumu.
Jak radar používá rádio?
Jakmile je radar umístěn na lodi nebo v letadle, vyžaduje podobnou základní sadu komponentů k produkci rádiových signálů, jejich přenosu do vesmíru a jejich přijímání něčím, a nakonec k zobrazení informací, aby tomu porozuměl. Magnetron je jeden druh zařízení používaného ke generování rádiových signálů, které se používají prostřednictvím rádia. Tyto signály jsou podobné světelným signálům, protože se pohybují stejnou rychlostí, ale jejich signály jsou mnohem delší a mají méně frekvencí.
Vlnová délka světelných signálů je 500 nanometrů, zatímco rádiové signály používané radarem se obvykle pohybují od centimetrů do metrů. V elektromagnetickém spektru jsou oba signály, jako je rádio a světlo, vytvářeny s různým designem magnetické a elektrické energie ve vzduchu. Magnetron v radaru generuje mikrovlny stejně jako mikrovlnná trouba. Hlavní rozdíl spočívá v tom, že magnetron v radaru musí přenášet signály několik mil, nikoli jen na malé vzdálenosti, takže je výkonnější i mnohem větší.
Kdykoli byly vysílány rádiové signály, funguje anténa jako vysílač pro jejich přenos do vzduchu. Obecně je tvar antény ohnutý, takže hlavně zaměřuje signály na přesný a úzký signál, ale radarové antény se také normálně otáčejí, aby si mohly všimnout akcí na velké ploše.
Rádiové signály cestují ven z antény rychlostí 300 000 km za sekundu, dokud na něco nenarazí a některé z nich se vrátí zpět k anténě. V radarovém systému existuje základní zařízení, jmenovitě duplexer. Toto zařízení se používá k provádění změn antény ze strany na stranu mezi vysílačem a přijímačem.
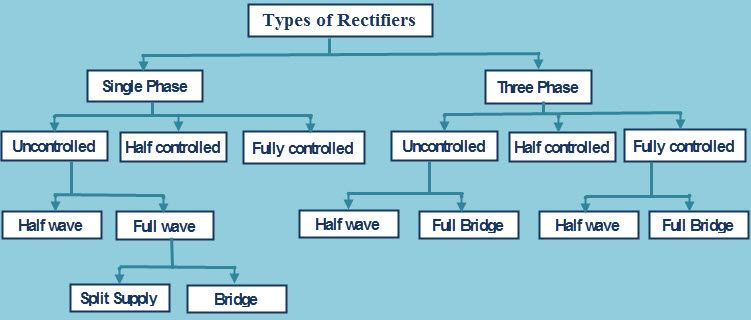
Druhy radaru
Existují různé typy radarů, které zahrnují následující.
Bistatický radar
Tento typ radarového systému zahrnuje vysílač Tx a přijímač Rx, které jsou rozděleny na vzdálenost, která je ekvivalentní vzdálenosti odhadovaného objektu. Vysílač a přijímač jsou umístěny v podobné poloze, která se nazývá klášterní radar, zatímco vojenský hardware země-vzduch velmi vzdálený a vzduch-vzduch používá bistatický radar.
Dopplerův radar
Jedná se o speciální typ radaru, který využívá Dopplerův efekt ke generování datové rychlosti týkající se cíle v určité vzdálenosti. Toho lze dosáhnout vysíláním elektromagnetických signálů ve směru objektu, takže analyzuje, jak akce objektu ovlivnila frekvenci vráceného signálu.
Tato změna poskytne velmi přesná měření pro radiální složku rychlosti objektu ve vztahu k radaru. Aplikace těchto radarů zahrnují různá průmyslová odvětví, jako je meteorologie, letectví, zdravotnictví atd.
Monopulzní radar
Tento druh radarového systému porovnává získaný signál pomocí konkrétního radarového pulzu vedle něj kontrastem signálu, jak je pozorováno v mnoha směrech, jinak polarizací. Nejběžnějším typem monopulzního radaru je kuželový skenovací radar. Tento druh radaru vyhodnocuje návratnost dvěma způsoby, jak přímo měřit polohu objektu. Je důležité poznamenat, že radary, které byly vyvinuty v roce 1960, jsou monopulzní radary.
Pasivní radar
Tento druh radaru je určen hlavně k pozorování a sledování cílů zpracováním indikací z osvětlení v okolí. Tyto zdroje zahrnují komunikační signály i komerční vysílání. Kategorizaci tohoto radaru lze provést ve stejné kategorii bistatických radarů.
Přístrojový radar
Tyto radary jsou určeny pro testování letadel, raket, raket atd. Poskytují různé informace, včetně prostoru, polohy a času, a to jak při analýze post-processingu, tak v reálném čase.
Meteorologické radary
Používají se k detekci směru a počasí pomocí rádiových signálů kruhovou nebo vodorovnou polarizací. Frekvenční volba meteorologického radaru závisí hlavně na kompromisu výkonu mezi útlumem a odrazem srážek v důsledku atmosférické vodní páry. Některé typy radarů jsou konstruovány hlavně tak, aby využívaly Dopplerovy směny k výpočtu rychlosti větru a také duální polarizaci k rozpoznání typů srážek.
Mapování radaru
Tyto radary se používají hlavně k průzkumu velké geografické oblasti pro aplikace dálkového průzkumu Země a geografie. V důsledku radaru se syntetickou aperturou jsou tyto omezeny na zcela stacionární cíle. Existuje několik konkrétních radarových systémů používaných k detekci lidí po zdech, které se liší od systémů nalezených ve stavebních materiálech.
Navigační radary
Obecně jsou stejné pro vyhledávání radarů, ale jsou k dispozici s malými vlnovými délkami, které jsou schopné replikovat se ze země a z kamenů. Ty se běžně používají na obchodních lodích i na dálkových letadlech. Existují různé navigační radary, jako jsou námořní radary, které jsou umístěny běžně na lodích, aby se zabránilo kolizi, stejně jako navigační účely.
Pulzní RADAR
Pulzní RADAR vysílá vysoko výkonné a vysokofrekvenční impulzy směrem k cílovému objektu. Poté čeká na echo signál z objektu, než je vyslán další puls. Rozsah a rozlišení RADARU závisí na frekvenci opakování pulzů. Využívá metodu Dopplerova posunu.
Princip detekce pohyblivých objektů pomocí RADARU pomocí Dopplerova posunu funguje na skutečnosti, že ozvěnové signály ze stacionárních objektů jsou ve stejné fázi, a proto se zruší, zatímco ozvěnové signály z pohybujících se objektů budou mít určité změny ve fázi. Tyto radary jsou rozděleny do dvou typů.
Pulzní Doppler
Vysílá vysokou frekvenci opakování pulzů, aby se zabránilo Dopplerovým nejasnostem. Vysílaný signál a přijatý echo signál jsou smíchány v detektoru, aby se získal Dopplerův posun, a rozdílový signál je filtrován pomocí Dopplerova filtru, kde jsou nežádoucí signály šumu odmítnuty.

Blokové schéma pulzního Dopplerova radaru
Indikátor pohybu cíle
Vysílá nízkou frekvenci opakování pulzů, aby se zabránilo nejasnostem rozsahu. V systému MTI RADAR jsou přijaté ozvěnové signály z objektu směrovány do směšovače, kde jsou smíchány se signálem ze stabilního lokálního oscilátoru (STALO) za vzniku IF signálu.
Tento IF signál je zesílen a poté předán fázovému detektoru, kde je jeho fáze porovnána s fází signálu z koherentního oscilátoru (COHO) a je produkován rozdílový signál. Koherentní signál má stejnou fázi jako signál vysílače. Koherentní signál a signál STALO jsou smíchány a předány výkonovému zesilovači, který se zapíná a vypíná pomocí pulzního modulátoru.

Radar MTI
Kontinuální vlna
Kontinuální vlna RADAR neměří rozsah cíle, ale spíše rychlost změny rozsahu měřením Dopplerova posunu zpětného signálu. V CW RADARU je místo pulzů emitováno elektromagnetické záření. V zásadě se používá pro měření rychlosti .
RF signál a IF signál jsou smíchány ve směšovacím stupni pro generování frekvence místního oscilátoru. RF signál je poté vysílán a přijímaný signál anténou RADAR sestává z RF frekvence plus Dopplerovy frekvence posunu. Přijatý signál je smíchán s kmitočtem lokálního oscilátoru ve druhém stupni směšování za účelem generování signálu frekvence IF.
Tento signál je zesílen a předán do třetího směšovacího stupně, kde je smíchán s IF signálem, aby se získal signál s Dopplerovou frekvencí. Tato Dopplerova frekvence nebo Dopplerův posun udává rychlost změny rozsahu cíle a tak se měří rychlost cíle.

Blokové schéma ukazující CW RADAR
Rovnice dosahu radaru
Pro rovnice radarového dosahu jsou k dispozici různé druhy verzí. Zde je následující rovnice jedním ze základních typů pro jediný anténní systém. Pokud se předpokládá, že se objekt nachází ve středu signálu antény, lze nejvyšší dosah detekce radaru zapsat jako
Rmax = 4√Pt λ2G2σ / (4π) 3Pmin
= 4√Pt C2G2σ / fo2 (4π) 3Pmin
„Pt“ = vysílaný výkon
„Pmin“ = minimální detekovatelný signál
„Λ“ = vysílaná vlnová délka
„Σ“ = Průřez cílovým radarem
„Fo“ = frekvence v Hz
„G“ = zisk antény
„C“ = rychlost světla
Ve výše uvedené rovnici jsou proměnné stabilní a spoléhají na radar kromě cíle, jako je RCS. Pořadí vysílacího výkonu bude 1 mW (0 dBm) a zisk antény přibližně 100 (20 dB) pro ERP (efektivní vyzářený výkon) 20 dBm (100 mW). Pořadí nejméně znatelných signálů jsou picowatty a RCS pro vozidlo může být 100 metrů čtverečních.
Vstupními daty tedy budou přesnost rovnice radarového dosahu. Pmin (minimální znatelný signál) závisí hlavně na šířce pásma přijímače (B), F (šumový údaj), T (teplota) a potřebném poměru S / N (poměr signálu k šumu).
Přijímač s úzkou šířkou pásma bude citlivější ve srovnání se širokým přijímačem BW. Hodnotu šumu lze definovat, protože se jedná o výpočet toho, kolik šumu může přijímač přispět k signálu. Pokud je hodnota šumu menší, bude šum menší, než zařízení daruje. Když se teplota zvýší, ovlivní to citlivost přijímače zvýšením vstupního šumu.
Pmin = k T B F (S / N) min
Z výše uvedené rovnice
„Pmin“ je nejméně detekovatelný signál
„K“ je Boltzmannova konstanta jako 1,38 x 10-23 (W * s / ° Kelvin)
„T“ je teplota (° Kelvin)
„B“ je šířka pásma přijímače (Hz)
„F“ je hodnota šumu (dB), koeficient šumu (poměr)
(S / N) min = nejméně poměr S / N
Výkon tepelného šumu i / p, který je k dispozici, může být úměrný kTB, kdekoli „k“ je Boltzmannova konstanta, „T“ je teplota a „B“ je šířka pásma šumu přijímače v hertzích.
T = 62,33 ° F nebo 290 ° K.
B = 1 Hz
kTB = -174 dBm / Hz
Výše uvedenou rovnici dosahu radaru lze zapsat pro přijímaný výkon jako rozsah funkcí pro poskytovaný vysílací výkon, zisk antény, RCS a vlnovou délku.
Prec = Pt λ2G2σ / (4π) 3R4max = Pt C2G2σ / (4π) 3R4fo2
Prec = PtG2 (λ / 4π) 2 σ / 4πR2
Z výše uvedené rovnice
„Prec“ je přijímaná síla
„Pt“ je vysílací výkon
„Fo“ je vysílací frekvence
„Λ“ je vlnová délka přenosu
„G“ je zisk antény
„Σ“ je průřez radaru
„R“ je rozsah
„C“ je rychlost světla
Aplikace
The aplikace radaru zahrnout následující.
Vojenské aplikace
Má 3 hlavní aplikace v armádě:
- V protivzdušné obraně se používá pro detekci cílů, rozpoznávání cílů a ovládání zbraní (nasměrování zbraně na sledované cíle).
- V raketovém systému k vedení zbraně.
- Identifikace nepřátelských míst na mapě.
Řízení letového provozu
Má 3 hlavní aplikace v řízení letového provozu:
- Řízení letového provozu v blízkosti letišť. Air Surveillance RADAR se používá k detekci a zobrazení polohy letadla v letištních terminálech.
- Vedení letadla k přistání za špatného počasí pomocí RADARU Precision Approach.
- Skenovat na letišti polohu letadel a pozemních vozidel
Dálkový průzkum Země
Lze jej použít k pozorování, zda pozorování planetárních pozic a sledování mořského ledu, aby byla zajištěna hladká trasa lodí.
Řízení pozemního provozu
Může jej také použít dopravní policie k určení rychlosti vozidla a ke kontrole pohybu vozidel varováním před přítomností jiných vozidel nebo jiných překážek za nimi.
Prostor
Má 3 hlavní aplikace
- Vedení vesmírného vozidla pro bezpečné přistání na Měsíci
- Pozorovat planetární systémy
- K detekci a sledování satelitů
- Monitorovat meteory
Takže teď jsem dal základní porozumění RADARU , co takhle navrhnout jednoduchý projekt zahrnující RADAR?
Fotografické kredity
- Blokové schéma ukazující CW RADAR podle Radartutorial