
Krokový motor je elektromechanické zařízení, které přeměňuje elektrickou energii na mechanickou. Je to také střídavý synchronní elektrický motor, který může rozdělit plnou rotaci na rozsáhlý počet kroků. Pozici motoru lze přesně řídit bez jakéhokoli zpětnovazebního mechanismu, pokud je motor pečlivě dimenzován na aplikaci. Krokové motory jsou podobné spínaným reluktanční motory. Krokový motor využívá teorii provozu magnetů k tomu, aby hřídel motoru otočil o přesnou vzdálenost, když je poskytnut impuls elektřiny. Stator má osm pólů a rotor má šest pólů. Rotor bude vyžadovat 24 pulzů elektřiny, aby se pohybovalo po 24 krocích, aby došlo k jedné úplné revoluci. Jiným způsobem, jak to říci, je to, že rotor se bude pohybovat přesně o 15 ° pro každý impuls elektřiny, který motor přijímá.
Konstrukční a pracovní princip
The konstrukce krokového motoru poměrně souvisí s a Stejnosměrný motor . Obsahuje permanentní magnet, jako je Rotor, který je uprostřed a otočí se, jakmile na něj působí síla. Tento rotor je uzavřen skrz č. statoru, který je navinut magnetickou cívkou po celém obvodu. Stator je uspořádán v blízkosti rotoru, takže magnetická pole uvnitř statorů mohou řídit pohyb rotoru.

Krokový motor
Krokový motor lze ovládat jedním po druhém napájením každého statoru. Stator tedy bude magnetizovat a bude fungovat jako elektromagnetický pól, který využívá odpudivou energii na rotoru k pohybu vpřed. Alternativní magnetizace i demagnetizace statoru posune rotor postupně a umožní mu výbornou kontrolu.
The princip fungování krokového motoru je elektromagnetický magnetismus. Obsahuje rotor, který je vyroben s permanentním magnetem, zatímco stator je s elektromagnety. Jakmile je dodáváno napájení do vinutí statoru, bude magnetické pole vyvíjeno uvnitř statoru. Nyní se rotor v motoru začne pohybovat s rotujícím magnetickým polem statoru. Toto je základní pracovní princip tohoto motoru.

Konstrukce krokového motoru
V tomto motoru je měkké železo, které je uzavřeno elektromagnetickými statory. Póly statoru i rotoru nezávisí na druhu krokového motoru. Jakmile jsou statory tohoto motoru pod napětím, rotor se bude otáčet, aby se vyrovnal se statorem, jinak se otočí, aby měl statorem nejmenší mezeru. Tímto způsobem se statory aktivují v sérii za účelem otáčení krokového motoru.
Řidičské techniky
Technika řízení krokovým motorem U některých speciálních obvodů je to možné kvůli jejich složité konstrukci. Existuje několik způsobů pohonu tohoto motoru, některé z nich jsou popsány níže na příkladu čtyřfázového krokového motoru.
Režim Single Excitation
Základní metodou řízení krokového motoru je jediný budicí režim. Je to stará metoda, která se v současné době příliš nepoužívá, ale o této technice je třeba něco vědět. V této technice bude každá fáze, jinak stator vedle sebe, spuštěn jeden po druhém, alternativně se speciálním obvodem. Tím se magnetizuje a demagnetizuje stator, aby se rotor posunul dopředu.
Full Step Drive
V této technice se aktivují dva statory najednou, místo jednoho ve velmi kratším časovém období. Tato technika vede k vysokému točivému momentu a umožňuje motoru pohánět vysoké zatížení.
Poloviční krok jízdy
Tato technika poměrně souvisí s pohonem Full step, protože dva statory budou uspořádány vedle sebe, takže bude aktivován jako první, zatímco třetí bude aktivován poté. Tento druh cyklu pro první přepnutí dvou statorů a po tomto třetím statoru bude pohánět motor. Tato technika povede ke zlepšení rozlišení krokového motoru při snížení točivého momentu.
Micro Stepping
Tato technika se nejčastěji používá kvůli své přesnosti. Variabilní krokový proud bude dodáván prostřednictvím obvod budiče krokového motoru směrem k cívkám statoru ve formě sinusového průběhu. Přesnost každého kroku může být zvýšena tímto malým krokovým proudem. Tato technika je široce používána, protože poskytuje vysokou přesnost a do značné míry snižuje provozní hluk.
Obvod krokového motoru a jeho provoz
Krokové motory pracují jinak Stejnosměrné kartáčové motory , které se otáčejí, když je na jejich svorky přivedeno napětí. Krokové motory, na druhé straně, účinně mají více ozubených elektromagnetů uspořádaných kolem centrálního kusu železa ve tvaru ozubeného kola. Elektromagnety jsou napájeny externím řídicím obvodem, například mikrokontrolérem.

Obvod krokového motoru
Aby se hřídel motoru otočil, je nejprve napájen jeden elektromagnet, díky němuž jsou zuby ozubeného kola magneticky přitahovány k zubům elektromagnetu. V okamžiku, kdy jsou zuby ozubeného kola vyrovnány s prvním elektromagnetem, jsou mírně posunuty od dalšího elektromagnetu. Když je tedy další elektromagnet zapnut a první je vypnut, ozubené kolo se mírně otáčí, aby se vyrovnalo s dalším elektromagnetem, a odtud se postup opakuje. Každá z těchto mírných rotací se nazývá krok, přičemž celé číslo dělá celou rotaci.
Tímto způsobem lze motor přesně otáčet. Krokový motor se netočí nepřetržitě, otáčí se v krocích. K dispozici jsou 4 cívky s 90neboúhel mezi sebou upevněný na statoru. Připojení krokového motoru je určeno způsobem propojení cívek. U krokového motoru nejsou cívky připojeny. Motor má 90nebokrok otáčení s cívkami napájenými v cyklickém pořadí, určující směr otáčení hřídele.
Fungování tohoto motoru je zobrazeno ovládáním spínače. Cívky se aktivují v sérii v intervalech 1 s. Hřídel se otáčí o 90 °nebopokaždé, když je aktivována další cívka. Jeho točivý moment při nízkých otáčkách se bude měnit přímo podle proudu.
Typy krokového motoru
Existují tři hlavní typy krokových motorů, jsou to:
- Krokový magnet s permanentním magnetem
- Hybridní synchronní krokovač
- Variabilní krokový odpor
Krokový motor s permanentním magnetem
Motory s permanentními magnety používají permanentní magnet (PM) v rotoru a pracují na přitahování nebo odpuzování mezi rotorem PM a statorovými elektromagnety.
Toto je nejběžnější typ krokového motoru ve srovnání s různými typy krokových motorů dostupných na trhu. Tento motor obsahuje permanentní magnety v konstrukci motoru. Tento druh motoru je také znám jako motor z plechovky / plechovky. Hlavní výhodou tohoto krokového motoru jsou nižší výrobní náklady. Pro každou revoluci má 48-24 kroků.
Krokový motor s proměnnou neochotou
Motory s proměnnou reluktancí (VR) mají rotor z obyčejného železa a fungují na principu, že k minimální reluktanci dochází s minimální mezerou, proto jsou body rotoru přitahovány k pólům statorového magnetu.
Variabilní neochota krokového motoru je základním typem motoru a používá se již několik let. Jak název napovídá, úhlová poloha rotoru závisí hlavně na neochotě magnetického obvodu, která se může vytvořit mezi zuby statoru i rotoru.
Hybridní synchronní krokový motor
Hybridní krokové motory jsou pojmenovány proto, že k dosažení maximálního výkonu v malých velikostech balení používají kombinaci permanentních magnetů (PM) a variabilní reluktance (VR).
Nejoblíbenějším typem motoru je hybridní krokový motor protože poskytuje dobrý výkon ve srovnání s rotorem s permanentním magnetem, pokud jde o rychlost, rozlišení kroku a udržovací moment. Tento typ krokového motoru je ale drahý ve srovnání s krokovými motory s permanentními magnety. Tento motor kombinuje vlastnosti krokových motorů s permanentním magnetem a proměnnou reluktancí. Tyto motory se používají tam, kde je vyžadován menší úhel kroku, jako je 1,5, 1,8 a 2,5 stupně.
Jak vybrat krokový motor?
Před výběrem krokového motoru pro váš požadavek je velmi důležité prozkoumat křivku točivého momentu a rychlosti motoru. Tyto informace tedy poskytuje konstruktér motoru a jedná se o grafický symbol točivého momentu motoru při zadaných otáčkách. Křivka točivého momentu a rychlosti motoru by měla přesně odpovídat potřebám aplikace, jinak nelze dosáhnout očekávaného výkonu systému.
Druhy zapojení
Krokové motory jsou obecně dvoufázové motory, jako jsou unipolární, jinak bipolární. Pro každou fázi v unipolárním motoru existují dvě vinutí. Zde je středový závit běžný jeden vodič mezi dvěma vinutími k pólu. Unipolární motor má 5 až 8 vodičů.
V konstrukci, kde je společný ze dvou pólů rozdělen, avšak se středovým závitem, obsahuje tento krokový motor šest přívodů. Pokud jsou dvoupólové středové odbočky uvnitř krátké, pak tento motor obsahuje pět vodičů. Unipolární s 8 vodiči usnadní sériové i paralelní připojení, zatímco motor s pěti nebo šesti vodiči má sériové připojení statorové cívky. Činnost unipolárního motoru může být zjednodušena, protože při jejich provozu neexistuje požadavek na obrácení toku proudu v budicím obvodu, které jsou známé jako bifilární motory.
V bipolárním krokovém motoru je pro každý pól jediné vinutí. Směr napájení se musí přes hnací obvod změnit, aby se stal složitým, takže se těmto motorům říká unifilární motory.
Ovládání krokového motoru střídáním hodinových impulzů
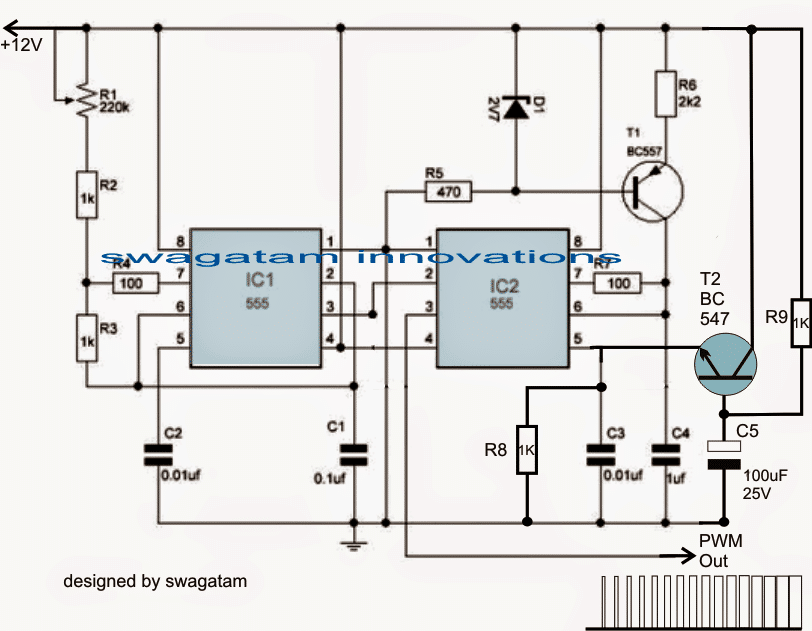
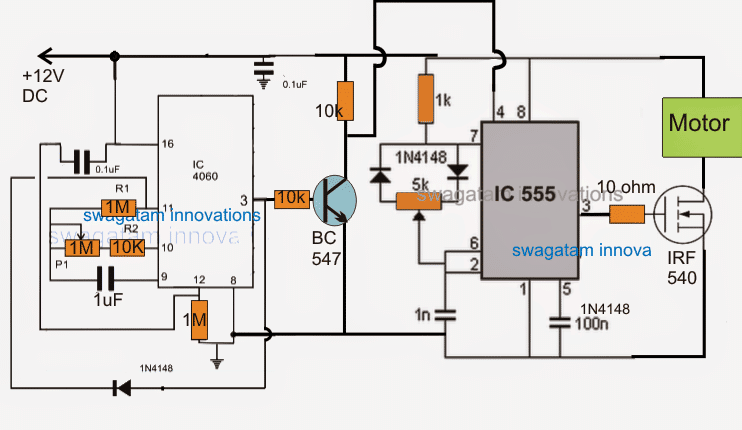
Řízení krokového motoru obvod je jednoduchý a levný obvod, který se používá hlavně v aplikacích s nízkým výkonem. Obvod je znázorněn na obrázku, který se skládá z 555 časovačů IC jako stabilního multivibrátoru. Četnost se vypočítá pomocí daného vztahu.
Frekvence = 1 / T = 1,45 / (RA + 2RB) C Kde RA = RB = R2 = R3 = 4,7 kiloohmů a C = C2 = 100 µF.

Ovládání krokového motoru střídáním hodinových impulzů
Výstup časovače se používá jako hodiny pro dva 7474 duální klopné obvody „D“ (U4 a U3) nakonfigurované jako počítadlo prstenů. Když je napájení původně zapnuto, nastaví se pouze první klopný obvod (tj. Q výstup na pinu 5 U3 bude na logice „1“) a ostatní tři klopné obvody se resetují (tj. Výstup Q je na logice 0). Po přijetí hodinového impulzu se logický výstup „1“ prvního klopného obvodu přesune na druhý klopný obvod (kolík 9 U3).
Výstup logiky 1 se tedy neustále mění v kruhovém směru s každým hodinovým pulzem. Q výstupy všech čtyř klopných obvodů jsou zesíleny tranzistorovými poli Darling-ton uvnitř ULN2003 (U2) a připojeny k vinutí krokového motoru oranžová, hnědá, žlutá, černá na 16, 15,14, 13 ULN2003 a červená na + mám dodávku.
Společný bod vinutí je připojen k napájení + 12V DC, které je také připojeno ke kolíku 9 ULN2003. Barevný kód použitý pro vinutí se může u jednotlivých značek lišit. Když je napájení zapnuto, řídicí signál připojený k pinu SET prvního klopného obvodu a pinům CLR ostatních tří klopných obvodů je aktivní „nízký“ (kvůli obvodu zapnutí při zapnutí tvořenému R1 -C1) k nastavení prvního klopného obvodu a resetování zbývajících tří klopných obvodů.
Po resetu se Q1 IC3 změní na „vysokou“, zatímco všechny ostatní Q výstupy se „sníží“. Externí reset lze aktivovat stisknutím resetovacího spínače. Stisknutím resetovacího spínače můžete zastavit krokový motor. Uvolněním resetovacího spínače se motor opět začne otáčet stejným směrem.
Rozdíl mezi krokovým motorem a servomotorem
Servomotory jsou vhodné pro aplikace s vysokým točivým momentem a otáčkami, zatímco krokový motor je levnější, takže se používají tam, kde je vyžadován vysoký přidržovací moment, zrychlení s nízkým až středním, otevřená, jinak uzavřená provozní flexibilita. Rozdíl mezi krokovým motorem a servomotorem zahrnuje následující.
| Krokový motor | Servomotor |
| Motor, který se pohybuje v jednotlivých krocích, je znám jako krokový motor. | Servomotor je jeden druh motoru s uzavřenou smyčkou, který je připojen k kodéru a poskytuje zpětnou vazbu a polohu rychlosti.
|
| Krokový motor se používá tam, kde je hlavní prioritou ovládání a také přesnost | Servomotor se používá tam, kde je hlavní prioritou rychlost
|
| Celkový počet pólů krokového motoru se pohybuje od 50 do 100 | Celkový počet pólů servomotoru se pohybuje od 4 do 12 |
| V systému s uzavřenou smyčkou se tyto motory pohybují s konzistentním pulzem | Tyto motory potřebují kodér ke změně impulzů k řízení polohy.
|
| Točivý moment je vysoký při nižší rychlosti | Krouticí moment je při vysoké rychlosti nízký |
| Doba polohování je rychlejší během krátkých úderů | Doba polohování je rychlejší během dlouhých úderů |
| Pohyb setrvačnosti s vysokou tolerancí | Pohyb setrvačnosti s nízkou tolerancí |
| Tento motor je vhodný pro mechanismy s nízkou tuhostí, jako jsou kladky a řemeny | Není vhodné pro mechanismus s menší tuhostí |
| Schopnost reagovat je vysoká | Schopnost reagovat je nízká |
| Používají se pro kolísající zatížení | Ty se nepoužívají pro kolísající zatížení |
| Úprava zesílení / ladění není nutná | Je nutná úprava zesílení / ladění |
Krokový motor vs stejnosměrný motor
Krokové i stejnosměrné motory se používají v různých průmyslových aplikacích, ale hlavní rozdíly mezi těmito dvěma motory jsou trochu matoucí. Zde uvádíme některé společné charakteristiky mezi těmito dvěma designy. Každá charakteristika je popsána níže.
Vlastnosti | Krokový motor | Stejnosměrný motor |
| Kontrolní charakteristiky | Jednoduché a využívá mikrokontrolér | Jednoduché a žádné doplňky navíc |
| Rozsah rychlostí | Nízká od 200 do 2 000 otáček za minutu | Mírný |
| Spolehlivost | Vysoký | Mírný |
| Účinnost | Nízký | Vysoký |
| Charakteristiky točivého momentu nebo rychlosti | Nejvyšší točivý moment při nižších rychlostech | Vysoký točivý moment při nižších rychlostech |
| Náklady | Nízký | Nízký |
Parametry krokového motoru
Parametry krokového motoru zahrnují hlavně úhel kroku, kroky pro každou otáčku, kroky pro každou sekundu a RPM.
Krokový úhel
Krokový úhel krokového motoru lze definovat jako úhel, o který se rotor motoru otáčí, jakmile je na vstup statoru uveden jeden impuls. Rozlišení motoru lze definovat jako počet kroků motoru a počet otáček rotoru.
Rozlišení = počet kroků / počet otáček rotoru
O uspořádání motoru lze rozhodnout v úhlu kroku a je vyjádřeno ve stupních. Rozlišení motoru (číslo kroku) je ne. kroků, které se provedou v rámci jedné otáčky rotoru. Když je krokový úhel motoru malý, je rozlišení pro uspořádání tohoto motoru vysoké.
Přesnost uspořádání objektů prostřednictvím tohoto motoru závisí hlavně na rozlišení. Jakmile je rozlišení vysoké, bude přesnost nízká.
Některé motory s přesností mohou vytvořit 1000 kroků v rámci jedné otáčky, včetně 0,36 stupně úhlu kroku. Typický motor zahrnuje 1,8 stupně úhlu kroku s 200 kroky pro každou otáčku. Různé úhly kroků, například 15 stupňů, 45 stupňů a 90 stupňů, jsou u běžných motorů velmi běžné. Počet úhlů se může změnit ze dvou na šest a malého úhlu kroku lze dosáhnout prostřednictvím štěrbinových pólových dílů.
Kroky pro každou revoluci
Kroky pro každé rozlišení lze definovat jako počet úhlů kroků potřebných pro celkovou revoluci. Vzorec pro toto je 360 ° / úhel kroku.
Kroky za každou sekundu
Tento druh parametru se používá hlavně k měření počtu kroků v každé sekundě.
Revoluce za minutu
Otáčky jsou otáčky za minutu. Používá se k měření frekvence otáčení. Takže pomocí tohoto parametru můžeme vypočítat počet otáček za minutu. Hlavní vztah mezi parametry krokového motoru je následující.
Kroky za každou sekundu = otáčky za minutu x kroky za otáčku / 60
Propojení krokového motoru s mikrokontrolérem 8051
Rozhraní krokového motoru s 8051 je velmi jednoduché pomocí tří režimů, jako je vlnový pohon, plný krokový pohon a půl krokový pohon tím, že se 0 a 1 dají čtyřvodičovým motorům na základě toho, který režim pohonu musíme zvolit pro provoz tohoto motoru.
Zbývající dva vodiče musí být připojeny ke zdroji napětí. Zde se používá unipolární krokový motor, kde jsou čtyři konce cívek připojeny k primárním čtyřem pinům portu-2 v mikrokontroléru pomocí ULN2003A.
Tento mikrokontrolér nedodává dostatečný proud pro pohon cívek, takže současný ovladač IC má rád ULN2003A. Musí být použit ULN2003A a je to kolekce 7 párů NPN Darlington tranzistorů. Návrh Darlingtonova páru lze provést pomocí dvou bipolárních tranzistorů, které jsou připojeny k dosažení maximálního proudového zesílení.
V IC IC ULN2003A jsou vstupní piny 7, výstupní piny 7, kde dva piny jsou pro napájecí a zemnící svorky. Zde se používají 4 vstupy a 4 výstupy. Jako alternativa k ULN2003A se L293D IC používá také pro zesílení proudu.
Je třeba velmi pečlivě sledovat dva běžné vodiče a čtyři vodiče cívky, jinak se krokový motor neotočí. To lze pozorovat měřením odporu pomocí multimetru, ale multimetr nebude zobrazovat žádné hodnoty mezi dvěma fázemi vodičů. Jakmile je společný vodič a další dva vodiče ve stejné fázi, musí vykazovat podobný odpor, zatímco cílové body dvou cívek v podobné fázi budou vykazovat dvojitý odpor ve srovnání s odporem mezi společným bodem a jedním koncovým bodem.
Odstraňování problémů
- Odstraňování problémů je proces kontroly stavu motoru, zda motor pracuje nebo ne. Následující kontrolní seznam se používá k řešení problémů s krokovým motorem.
- Nejprve ověřte připojení a kód obvodu.
- Pokud je to v pořádku, ověřte, zda je motor napájen správným napětím, jinak jednoduše vibruje, avšak neotáčí.
- Pokud je napájecí napětí v pořádku, pak ověřte koncové body čtyř cívky, která je spojena s IC ULN2003A.
- Nejprve objevte dva obecné koncové body a opravte je na napájení 12 V, poté opravte zbývající čtyři vodiče na IC ULN2003A. Dokud se krokový motor nespustí, vyzkoušejte všechny možné kombinace. Pokud toto připojení není správné, bude tento motor místo otáčení vibrovat.
Mohou krokové motory běžet nepřetržitě?
Obecně platí, že všechny motory běží nebo se otáčejí nepřetržitě, ale většina motorů se nemůže zastavit, když jsou pod napětím. Když se pokusíte omezit hřídel motoru, když je pod napětím, bude hořet nebo se zlomí.
Alternativně jsou krokové motory navrženy tak, aby vytvářely diskrétní krok, pak tam počkejte znovu a zůstaňte tam. Pokud chceme, aby motor zůstal na jednom místě po kratší dobu, než znovu vykročí, pak to bude vypadat jako nepřetržité otáčení. Spotřeba energie těchto motorů je vysoká, ale k rozptýlení výkonu dochází hlavně, když je motor zastaven nebo špatně navržen, pak existuje možnost přehřátí. Z tohoto důvodu se proudový přísun motoru často snižuje, pokud je motor v delší udržovací poloze.
Hlavním důvodem je, že jakmile se motor otáčí, lze jeho část vstupního elektrického výkonu změnit na mechanický výkon. Když se motor zastaví, když se otáčí, pak lze veškerý příkon změnit na teplo na vnitřní straně cívky.
Výhody
The výhody krokového motoru zahrnout následující.
- Robustnost
- Jednoduchá konstrukce
- Může pracovat v řídicím systému s otevřenou smyčkou
- Údržba je nízká
- Funguje to v každé situaci
- Spolehlivost je vysoká
- Úhel natočení motoru je úměrný vstupnímu impulzu.
- Motor má při zastavení plný točivý moment.
- Přesné polohování a opakovatelnost pohybu, protože dobré krokové motory mají přesnost 3 - 5% kroku a tato chyba není kumulativní z jednoho kroku do druhého.
- Vynikající reakce na rozjezd, zastavení a couvání.
- Velmi spolehlivé, protože v motoru nejsou žádné kontaktní kartáče. Životnost motoru proto jednoduše závisí na životnosti ložiska.
- Odezva motoru na digitální vstupní impulsy zajišťuje řízení s otevřenou smyčkou, díky čemuž je ovládání motoru jednodušší a méně nákladné.
- Je možné dosáhnout velmi nízké rychlosti synchronního otáčení se zátěží, která je přímo spojena s hřídelem.
- Lze realizovat širokou škálu rychlostí otáčení, protože rychlost je úměrná frekvenci vstupních impulzů.
Nevýhody
The nevýhody krokového motoru zahrnout následující.
- Účinnost je nízká
- Točivý moment motoru bude rychle klesat s rychlostí
- Přesnost je nízká
- Zpětná vazba se nepoužívá k určení potenciálních zmeškaných kroků
- Malý točivý moment k poměru setrvačnosti
- Extrémně hlučný
- Pokud motor není správně ovládán, mohou nastat rezonance
- Provoz tohoto motoru není při velmi vysokých rychlostech snadný.
- Je nutný vyhrazený ovládací obvod
- Ve srovnání se stejnosměrnými motory používá více proudu
Aplikace
The aplikace krokového motoru zahrnout následující.
- Průmyslové stroje - Krokové motory se používají v automobilových měřidlech a automatizovaných výrobních zařízeních obráběcích strojů.
- Bezpečnostní - nové sledovací produkty pro bezpečnostní průmysl.
- Lékařský - Krokové motory se používají uvnitř lékařských skenerů, vzorkovačů a nacházejí se také v digitálních zubních fotografiích, kapalinových pumpách, respirátorech a strojích pro analýzu krve.
- Spotřební elektronika - Krokové motory v kamerách pro automatické funkce zaostření a přiblížení digitálního fotoaparátu.
A také mít aplikace obchodních strojů, počítačové periferní aplikace.
O toto tedy jde přehled krokového motoru jako konstrukce, pracovní princip, rozdíly, výhody, nevýhody a její aplikace. Nyní máte představu o typech supermotorů a jejich aplikacích, pokud máte nějaké dotazy k tomuto tématu nebo k elektrickým a elektronické projekty zanechat komentáře níže.
Fotografický kredit
- Krokový motor podle MST







{kind=link}