
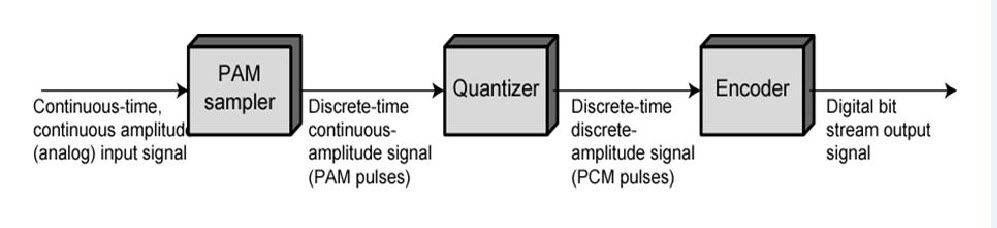
Motor Driver je základní zařízení, které poskytuje požadované napětí a proud pro a krokový motor aby to fungovalo hladce. Jedná se o stejnosměrný motor, který se otáčí v krocích. Chcete-li navrhnout ovladač krokového motoru, výběr správného zdroj napájení , mikrokontrolér a ovladač motoru jsou velmi důležité. Víme, že mikrokontroléry lze použít k otáčení motoru, ale při návrhu ovladače se musíme zaměřit na napětí a proud. Jedna deska ovladače motoru zvládne proudy a napětí motoru. Krokový motor se otáčí přesně pomocí ovladače synchronizací pulzních signálů pomocí ovladače. Tento ovladač motoru přijímá impulzní signály z mikrokontroléru a poté je mění v pohyb krokového motoru.
Co je ovladač krokového motoru?
Definice: Ovladač motoru, který je navržen tak, aby poháněl motor jako a krokový motor nepřetržité otáčení ovládáním přesné polohy bez použití zpětnovazebního systému je známé jako ovladač krokového motoru. Budiče tohoto motoru poskytují hlavně řízení proměnného proudu a také několik krokových rozlišení. Zahrnují pevné překladače, které umožňují ovládání motoru pomocí jednoduchých vstupů krok a směr.

řidič motoru-ULN2003
Mezi tyto ovladače patří různé druhy integrovaných obvodů které pracují při napájecím napětí nižším než 20 V. Integrované obvody nízkého napětí a nízkého nasycení napětí je nejlepší použít pro dvoufázový ovladač krokového motoru, který se používá v různých přenosných zařízeních, jako jsou fotoaparáty, tiskárny atd.
Tyto ovladače jsou k dispozici v různých hodnotách napětí i proudu. Výběr toho lze provést na základě požadavku na motor, který bude použit. Většina z těchto ovladačů je k dispozici ve velikosti 0,6 ″ × 0,8
Princip fungování ovladače krokového motoru
Princip činnosti tohoto budicího obvodu je řídit provoz krokového motoru vysíláním proudu pomocí různých fází v pulzech ve směru motoru. Návrháři často nepoužívali techniku řízení vln z důvodů, jako je to, že poskytuje malý točivý moment a neefektivní, protože jednoduše používá pouze 1-fáze motoru najednou.
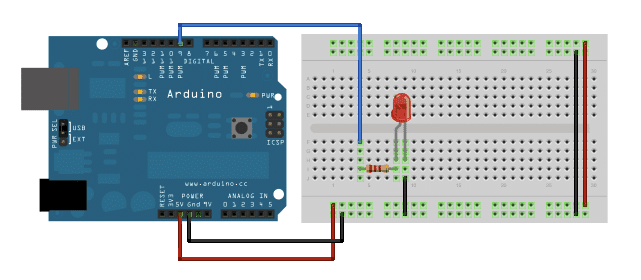
Základní součásti používané k řízení krokového motoru jsou ovladače jako mikroprocesor / mikrokontrolér, integrovaný obvod ovladače a napájecí zdroj (PSU). A další součásti, jako jsou spínače, potenciometry, chladič a připojovací vodiče.
Ovladač
Prvním krokem je výběr mikrokontroléru pro návrh ovladače. U krokového motoru by měl mít tento mikrokontrolér minimálně čtyři výstupní piny. Kromě toho zahrnuje ADC , časovače, sériový port založený na aplikaci ovladače.
Řidič motoru
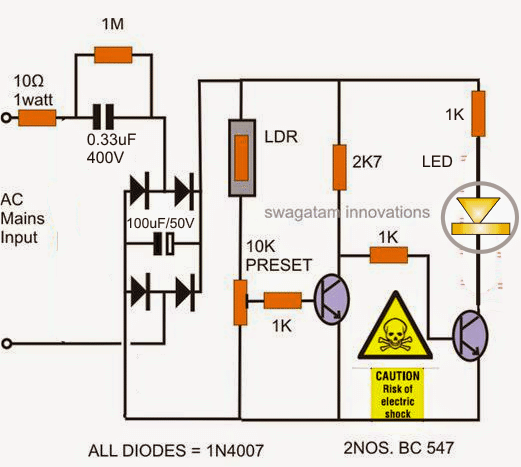
Integrované obvody ovladače motoru jsou k dispozici za nízkou cenu a lze je snadno provést, pokud jde o design, a pokročit tak po celou dobu návrhu obvodu. Výběr ovladačů lze provést na základě jmenovitých hodnot motoru, jako jsou napětí a proud. Nejoblíbenější ovladač motoru jako ULN2003 se používá v H-most založené aplikace. Je vhodný pro pohon krokového motoru. Tento ovladač obsahuje Darlingtonův pár, který zvládne maximální proud až 500 mA a maximální napětí až 50 V ss. The obvod budiče krokového motoru je zobrazen níže.

schéma zapojení motor-řidič
Zdroj napájení
Rozsah provozního napětí krokového motoru se pohybuje od 5 voltů do 12 voltů. Z toho odebíraný proud bude v rozsahu 100 mA až 400 mA. Návrh napájecího zdroje lze provést na základě specifikací motoru. Napájení by mělo být regulováno, aby se zabránilo kolísání točivého momentu a otáček.
Typy ovladačů krokových motorů
Řidiči pracují hlavně ve dvou režimech, jako je režim pulzního vstupu a režim integrovaného ovladače. Na základě požadovaného operačního systému lze vybrat požadovanou kombinaci.
Ovladače pulzního vstupu
Ovládání krokového motoru lze provádět pomocí pulzu generátor nabízené prostřednictvím spotřebitele. Dříve byl i / p generátoru impulzů provozní data. Zákazník vybere tento vstup na hostitelském programovatelném řadiči a poté zadá provozní příkaz.
Integrované ovladače typu ovladače
Tento druh ovladače umožňuje řízení krokového motoru přes počítač, který je přímo připojen, jinak programovatelný ovladač. Protože není nutný žádný samostatný generátor impulzů, mohou ovladače tohoto motoru ušetřit místo a zjednodušit zapojení.
Níže jsou uvedeny různé typy čipů ovladače motoru spolu s jeho funkcemi.
Řidiči motorů | Min. Provozní napětí | Max. Provozní napětí | Maximální trvalý proud pro každou fázi | Špičkový proud pro každou fázi | Funkce |
| A4988 | 8 V | 35 V | 1 A. | 2 A. | - |
| DRV8825 | 8,2 V | 45 V | 1,5 A | 2,2 A | Max. Vysoké napětí, Vysoký proud |
| DRV8834 | 2,5 V | 10,8 V | 1,5 A | 2 A. | Pracuje s nízkým napětím a vysokým proudem |
| DRV8880 | 6,5 V | 45 V | 1 A. | 1,6 A | Automatické ladění, Snížení digitálního proudu, maximální vysoké napětí |
| MP6500 | 4,5 V | 35 V | 1,5 A | 2,5 A. | Řízení vysokého proudu, digitální ovládání |
| TB67S279FTG | 10 V | 45 V | 1.1 A | 2 A. | ADMD, Auto Gain Control, Vysoká max Napětí |
| TB67S249FTG | 10 V | 47 V | 1,6 A | 4,5 A | Auto Gain Control, ADMD, vysoké maximální napětí, vysoký proud |
| STSPIN820 | 7 V | 45 V | 0,9 A | 1,5 A | 128 a 256 Mikrokroky, Max Napětí |
| STSPIN220 | 1,8 V | 10 V | 1.1 A | 1,3 A | 64, 128 a 256 mikro kroků, Nízké napětí Úkon |
Výhody a nevýhody
Mezi výhody a nevýhody ovladače krokového motoru patří následující.
- Pohon na baterie
- Bezpečný design
- Ochrana jiskry
- Ochrana tepelných
- Montážní prostor je malý
- Tento ovladač motoru se používá k pohonu Unipolárních krokových motorů.
- Tímto způsobem se můžeme vyhnout drahým deskám ovladačů.
Nevýhody jsou
- Konstrukce tohoto ovladače není efektivní.
- Pro malou aplikaci potřebuje hodně kabeláže.
Aplikace
Aplikace jsou
- Průmyslový
- Kartáčové stejnosměrné / krokové motory
Časté dotazy
1). Jaká je funkce krokového ovladače?
Slouží k ovládání činnosti krokového motoru
2). Který je nejlepší ovladač krokového motoru?
ULN2003 je nejlepší ovladač motoru.
3). Jaké jsou výhody krokového motoru?
Je to vysoká spolehlivost, jednoduchá, nízkonákladová, vysoký točivý moment atd.
4). Je krokový motor AC / DC?
Krokové motory jsou střídavé motory.
O toto tedy jde přehled krokového motoru Řidič. Jedná se o akční člen používaný ke změně signálu z pulzního na úhlové posunutí. Jakmile motor přijme pulzní signál, pohání krokový motor tak, aby se otáčel pod úhlem ve pevném směru. Výkon tohoto motoru závisí hlavně na řidiči motoru. Zde je otázka, jaký je programový algoritmus?








![Třpytivý LED květový obvod [Vícebarevný LED světelný efekt]](https://electronics.jf-parede.pt/img/3-phase-power/3B/glittering-led-flower-circuit-multicolored-led-light-effect-1.jpg)
