Obvod, který umožňuje uživateli lineárně řídit rychlost připojeného motoru otáčením připojeného potenciometru, se nazývá obvod ovladače rychlosti motoru.
Zde jsou představeny 3 snadno sestavitelné obvody regulátoru otáček pro stejnosměrné motory, jeden používá MOSFET IRF540, druhý používá IC 555 a třetí koncept s IC 556 se zpracováním točivého momentu.
Design # 1: Mosfet based DC Motor Speed Controller
Velmi chladný a snadný obvod řadiče otáček stejnosměrného motoru lze sestavit pomocí jediného mosfetu, rezistoru a hrnce, jak je znázorněno níže:

Pomocí sledovače vysílače BJT

Jak je vidět, mosfet je zmanipulován jako zdrojový sledovač nebo běžný režim odtoku, abyste se dozvěděli více o této konfiguraci, můžete odkaz na tento příspěvek , který pojednává o verzi BJT, zůstává pracovní princip stejný.
Ve výše uvedené konstrukci řadiče stejnosměrného motoru vytváří potenciometr rozdíl různých potenciálů napříč bránou mosfetu a zdrojový kolík mosfetu jednoduše sleduje hodnotu tohoto potenciálního rozdílu a podle toho upravuje napětí na motoru.
Znamená to, že zdroj bude vždy 4 nebo 5 V zaostávající za napětím brány a bude se s tímto rozdílem měnit nahoru / dolů, což bude mít proměnlivé napětí mezi 2 V a 7 V na motoru.
Když je hradlové napětí kolem 7V, zdrojový kolík dodá motoru minimálně 2V, což způsobí velmi pomalé otáčení motoru, a 7V bude k dispozici napříč zdrojovým kolíkem, když nastavení hrnce vygeneruje plných 12V přes bránu brány MOSFET.
Zde můžeme jasně vidět, že zdrojový kolík mosfetu vypadá, že „sleduje“ bránu, a tudíž následovník zdroje názvu.
To se děje proto, že rozdíl mezi bránou a zdrojovým kolíkem MOSFETu musí být vždy kolem 5V, aby MOSFET mohl optimálně fungovat.
Výše uvedená konfigurace každopádně pomáhá vynucovat plynulé řízení rychlosti motoru a design by mohl být sestaven docela levně.
BJT by mohl být také použit namísto MOSFETu a ve skutečnosti by BJT produkoval vyšší rozsah řízení od 1V do 12V přes motor.
Video ukázka
https://youtu.be/W762NTuQ19gPokud jde o rovnoměrné a efektivní řízení otáček motoru, stává se ideální volbou regulátor na bázi PWM, zde se dozvíme více o jednoduchém obvodu pro provedení této operace.
Design # 2: PWM DC Motor Control with IC 555
Konstrukci jednoduchého regulátoru otáček motoru pomocí PWM lze chápat takto:
Zpočátku, když je obvod napájen, je spouštěcí kolík v logicky nízké poloze, protože kondenzátor C1 není nabitý.
Výše uvedené podmínky iniciují oscilační cyklus, čímž se výstup změní na logicky vysokou hodnotu.
Vysoký výkon nyní nutí kondenzátor nabíjet pomocí D2.
Při dosažení úrovně napětí, která je 2/3 napájení, se aktivuje pin # 6, což je práh IC.
V okamžiku, kdy se aktivuje pin # 6, pin # 3 a pin # 7 se vrátí na logicky nízkou úroveň.
Když je pin # 3 nízký, C1 se opět začíná vybíjet přes D1, a když napětí na C1 klesne pod úroveň, která je 1/3 napájecího napětí, pin # 3 a pin # 7 se opět zvýší, což způsobí následování cyklu a pokračujte v opakování.
Je zajímavé poznamenat, že C1 má dvě diskrétně nastavené cesty pro proces nabíjení a vybíjení přes diody D1, D2 a přes odporová ramena nastavená v hrnci.
Znamená to, že součet odporů, se kterými se setkává C1 při nabíjení a vybíjení, zůstává stejný bez ohledu na to, jak je nastaven hrnec, proto vlnová délka výstupního pulzu zůstává vždy stejná.
Jelikož však časové úseky nabíjení nebo vybíjení závisí na hodnotě odporu vyskytující se v jejich drahách, hrnec diskrétně nastavuje tyto časové úseky podle jeho úprav.
Vzhledem k tomu, že doby nabíjení a vybíjení jsou přímo spojeny s výstupním pracovním cyklem, mění se podle přizpůsobení nádoby, což dává tvar zamýšleným měnícím se pulzům PWM na výstupu.
Průměrný výsledek poměru značka / prostor vede k výstupu PWM, který zase řídí stejnosměrné otáčky motoru.
PWM impulsy jsou přiváděny do brány mosfetu, který reaguje a řídí připojený proud motoru v reakci na nastavení hrnce.
Aktuální úroveň procházející motorem rozhoduje o jeho rychlosti, a tím realizuje řídící účinek přes banku.
Frekvenci výstupu z IC lze vypočítat podle vzorce:
F = 1,44 (VR1 * C1)
MOSFET lze vybrat podle požadavku nebo zátěžového proudu.
Schéma zapojení navrhovaného řadiče otáček stejnosměrného motoru je uvedeno níže:

Prototyp:

Důkaz testování videa:
https://youtu.be/M-F7MWcSiFYVe výše uvedeném videoklipu vidíme, jak se konstrukce založená na IC 555 používá k řízení rychlosti stejnosměrného motoru. Jak můžete být svědky, i když žárovka funguje perfektně v reakci na PWM a mění svou intenzitu od minimální záře po maximální nízkou, motor nefunguje.
Motor zpočátku nereaguje na úzké PWM, spíše začíná trhnutím poté, co jsou PWM upraveny na výrazně vyšší šířky pulzu.
To neznamená, že obvod má problémy, je to proto, že kotva stejnosměrného motoru je pevně držena mezi dvojicí magnetů. K zahájení rozběhu musí kotva přeskočit svou rotaci přes dva póly magnetu, což se nemůže stát pomalým a jemným pohybem. Musí to zasáhnout.
To je přesně důvod, proč motor zpočátku vyžaduje vyšší úpravy pro PWM a jakmile je zahájena rotace, kotva získá určitou kinetickou energii a nyní je možné dosáhnout pomalejší rychlosti prostřednictvím užších PWM.
Stále však může být nemožné dostat rotaci do stavu sotva se pohybujícího pomalého důvodu ze stejného důvodu, jak je vysvětleno výše.
Snažil jsem se co nejlépe zlepšit odezvu a dosáhnout co nejpomalejšího ovládání PWM provedením několika úprav v prvním diagramu, jak je znázorněno níže:

Z tohoto důvodu by motor mohl vykazovat lepší kontrolu na pomalejších úrovních, pokud je motor připevněn nebo připevněn k nákladu prostřednictvím ozubených kol nebo systému řemenice.
K tomu může dojít, protože zátěž bude působit jako tlumič a pomůže zajistit kontrolovaný pohyb během nastavení pomalejší rychlosti.
Design # 3: Použití IC 556 pro vylepšené řízení rychlosti
Měnící se rychlost stejnosměrného motoru se může zdát ne tak obtížné a můžete pro něj najít spoustu obvodů.
Tyto obvody však nezaručují konzistentní úrovně točivého momentu při nižších otáčkách motoru, což znemožňuje efektivní fungování.
Navíc při velmi nízkých otáčkách v důsledku nedostatečného točivého momentu má motor tendenci se zastavovat.
Další vážnou nevýhodou je, že u těchto obvodů není zahrnuta žádná funkce obrácení motoru.
Navrhovaný obvod je zcela bez výše uvedených nedostatků a je schopen generovat a udržovat vysoké úrovně točivého momentu i při nejnižších možných rychlostech.
Obvodový provoz
Než budeme diskutovat o navrhovaném obvodu ovladače motoru PWM, chtěli bychom se také naučit jednodušší alternativu, která není tak efektivní. Může to však být považováno za přiměřeně dobré, pokud není zatížení motoru příliš vysoké a pokud rychlost není snížena na minimální úroveň.
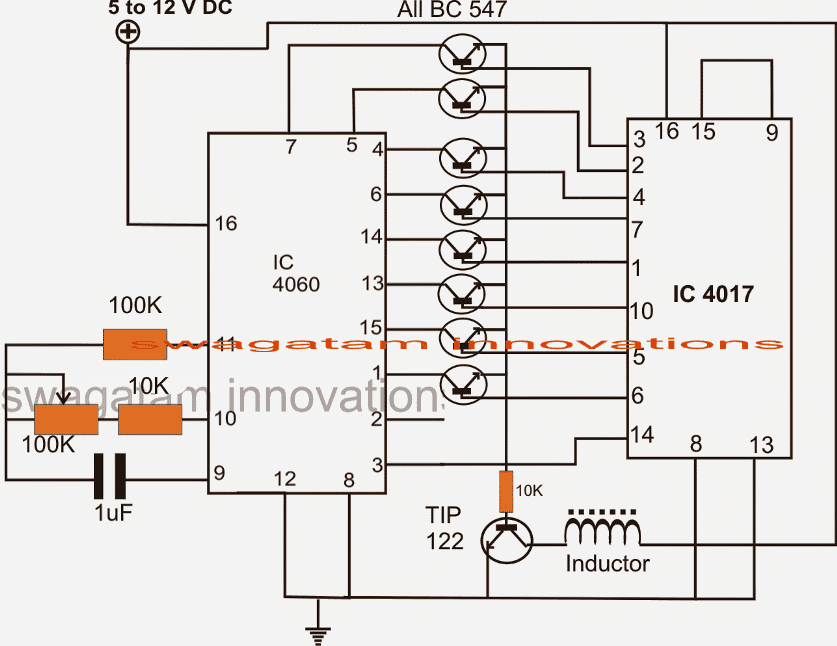
Obrázek ukazuje, jak lze použít jeden integrovaný obvod 556 pro řízení rychlosti připojeného motoru, nebudeme zacházet do podrobností, jedinou významnou nevýhodou této konfigurace je, že točivý moment je přímo úměrný rychlosti motoru.
Vrátíme-li se k navrhované konstrukci obvodu řídicí jednotky s vysokým točivým momentem, zde jsme použili dva integrované obvody 555 namísto jednoho nebo spíše jeden integrovaný obvod 555, který obsahuje dva integrované obvody 555 v jednom balíčku.
Kruhový diagram

Hlavní rysy
Stručně navrhované Ovladač stejnosměrného motoru obsahuje následující zajímavé funkce:
Rychlost lze plynule měnit z nuly na maximum bez zastavení.
Krouticí moment není nikdy ovlivněn úrovněmi otáček a zůstává konstantní i při minimálních úrovních otáček.
Otáčení motoru lze převrátit nebo obrátit během zlomku sekundy.
Rychlost je proměnlivá v obou směrech otáčení motoru.
Dva 555 integrovaných obvodů jsou přiřazeny dvěma samostatnými funkcemi. Jedna sekce je konfigurovatelná jako astabilní multivibrátor generující hodiny se čtvercovými vlnami 100 Hz, které se přivádějí do předchozí sekce 555 uvnitř balíčku.
Výše uvedená frekvence je zodpovědná za stanovení frekvence PWM.
Tranzistor BC 557 se používá jako zdroj konstantního proudu, který udržuje nabitý sousední kondenzátor v jeho kolektorovém rameni.
Toto vyvíjí napětí pilového zubu na výše uvedeném kondenzátoru, které je porovnáváno uvnitř IC 556 s napětím vzorku aplikovaným externě přes zobrazený vývod.
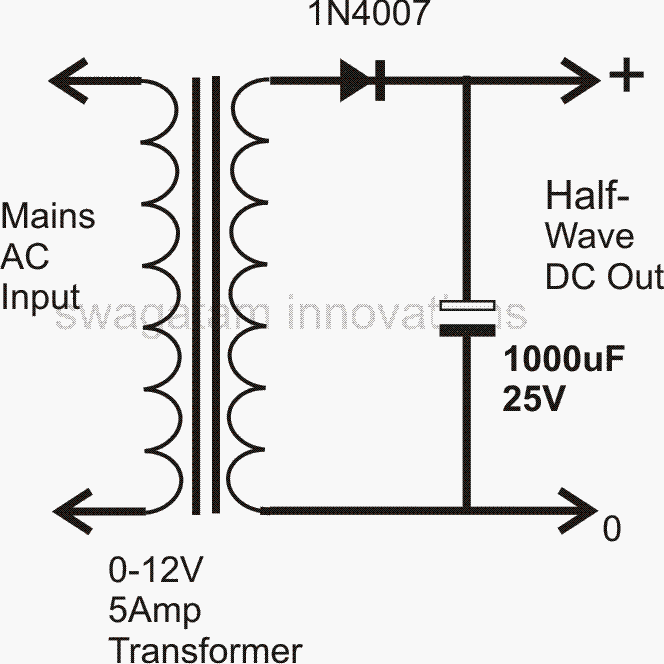
Vzorkovací napětí, které se aplikuje externě, lze odvodit z jednoduchého napájecího obvodu s proměnným napětím 0-12 V.
Toto měnící se napětí aplikované na 556 IC se používá ke změně PWM pulzů na výstupu a které se nakonec použije pro regulaci otáček připojeného motoru.
Spínač S1 slouží k okamžitému otočení směru motoru, kdykoli je to požadováno.
Seznam dílů
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 ohmů,
- R7, R8, R9, R10 = 470 ohmů,
- C1 = 0,1 uF,
- C2, C3 = 0,01 uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = přepínací přepínač SPDT
Výše uvedený okruh byl inspirován následujícím okruhem řidiče motoru, který byl publikován dlouho v elektronickém elektronickém časopise elecktor.
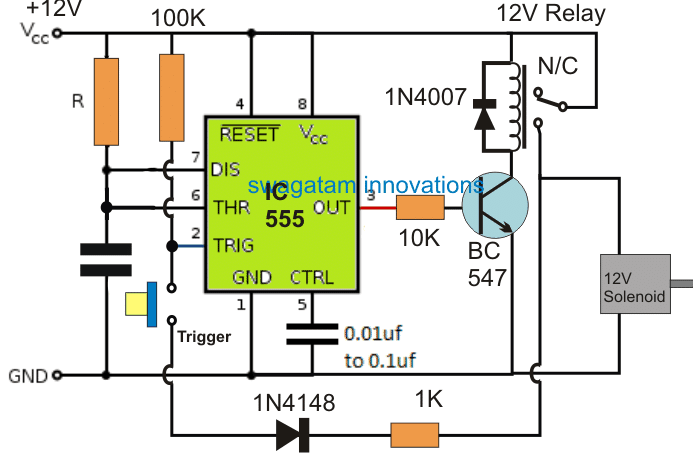
Řízení točivého momentu motoru pomocí IC 555

První diagram ovládání motoru lze mnohem zjednodušit použitím přepínače DPDT pro provoz obrácení motoru a použitím tranzistoru sledovače emitoru pro implementaci řízení rychlosti, jak je uvedeno níže:

Přesné ovládání motoru pomocí jednoho operačního zesilovače
Extrémně rafinované nebo složité ovládání stejnosměrného proudu motoru lze dosáhnout použitím operačního zesilovače a tachogenerátoru. Operační zesilovač je vybaven jako přepínač citlivý na napětí. V níže ukázaném obvodu, jakmile je výstup tachogenerátoru nižší než přednastavené referenční napětí, sepne se spínací tranzistor a motor bude napájen 100%.
Přepínací akce operačního zesilovače by nastala jen za pár milivoltů kolem referenčního napětí. Budete potřebovat duální napájecí zdroj, který může být jen zenerově stabilizovaný.

Tento ovladač motoru umožňuje nekonečně nastavitelný rozsah, aniž by docházelo k jakékoli formě mechanických potíží.
Výstup operačního zesilovače je pouze +/- 10% úrovně napájecích kolejnic, čímž se využívá sledovač dvojitého emitoru, takže lze regulovat obrovské rychlosti motoru.
Referenční napětí lze fixovat pomocí termistorů nebo LDR atd. Experimentální nastavení uvedené v schématu zapojení využívalo operační zesilovač RCA 3047A a 0,25 W 6V motor jako tachogenerátor, který generoval kolem 4V při 13000 ot / min zamýšlená zpětná vazba.
Předchozí: 3 nejlepší obvody zlodějů Joule Další: Obvod počítadla pískání tlakového hrnce