Bodeův graf a Nyquistův graf jsou velmi oblíbené grafy, zejména pro elektrochemickou impedanční spektroskopii nebo data EIS mezi elektrochemiky. Takže, Nyquist Plot je pojmenován po švédsko-Američanovi, jmenovitě „Harry Nyquist“. Je to elektroinženýr a vyvinul tento pozemek pro elektronické účely v roce 1932. Během EIS se shromažďuje mnoho informací a tyto shromážděné informace je třeba prezentovat. Takže obrázek poskytuje více informací než sto slov. K zobrazení elektrochemické impedanční spektroskopie se tedy používá grafické znázornění, jako je Nyquistův graf. Tento článek poskytuje informace o Nyquistův spiknutí – fungování, výhody a nevýhody.
Nyquistova definice spiknutí
Grafické znázornění, které je široce používáno pro přenosové funkce, je známé jako Nyquistův graf. Toto je graf frekvenční odezvy, který se používá k posouzení stability řídicího systému se zpětnou vazbou. Je to parametrický graf pro skutečnou a imaginární část přenosové funkce v rámci komplexní roviny, protože parametr frekvence se rozprostírá v určeném intervalu. V kartézských souřadnicích je reálná část nyquistovské přenosové funkce vynesena na ose X, zatímco imaginární část přenosové funkce je vynesena na ose Y.
Nyquist Plot se používá v automatickém řízení a zpracování signálu pro analýzu stability, protože kdokoli může okamžitě ověřit, zda smyčka s negativní zpětnou vazbou splňuje Nyquistův princip stability. Pokud Nyquistův spiknutí systém řízení s otevřenou smyčkou pokrývá přibližně bod přes skutečnou osu, poté je ekvivalentní systém uzavřené smyčky nestabilní.
Nyquistův graf
Nyquistovy grafy jsou rozšířením polárních grafů používaných hlavně pro hledání řídicí systémy s uzavřenou smyčkou stabilitu jednoduchou změnou „ω“ z −∞ na ∞. To znamená, že tyto grafy se většinou používají pro vykreslení celkové frekvenční odezvy přenosové funkce s otevřenou smyčkou. Nyquistův graf jednoduše vyhodnocuje stabilitu řídicího systému se zpětnou vazbou. Takže v kartézském souřadnicovém systému je skutečná hodnota přenosové funkce jednoduše vynesena přes osu X, zatímco imaginární část je jednoduše vynesena přes osu Y.
Podobný Nyquistův graf lze jednoduše vysvětlit polárními souřadnicemi, kde zisk přenosové funkce je radiální souřadnice a fáze přenosové funkce je ekvivalentní úhlová souřadnice.
Nyquistovu zápletku lze porozumět, pokud znáte některé použité terminologie. V Nyquistově grafu je uzavřená cesta v rámci komplexní roviny známá jako obrys.
Nyquistova cesta
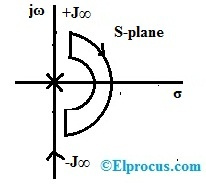
Nyquistova cesta nebo Nyquistův obrys je uzavřený obrys v rovině s, který zcela obklopuje celou pravou stranu roviny s. Pro uzavření celkové RHS letadla je nakreslen velký půlkruhový pruh o průměru podél osy „jω“ a středu u zdroje. Poloměr půlkruhu je jednoduše považován za Nyquistovo obklíčení.

Nyquistovo obklíčení
Je známo, že bod je obklopený přímkou, pokud se nachází v křivce.
Nyquistovo mapování
Postup, kterým se bod v rovině s změní na bod v rovině F(s), se nazývá mapování a F(s) se nazývá funkce mapování.
Analýza stability zpětnovazebního řídicího systému závisí hlavně na rozpoznání kořenů umístění pro charakteristické rovnice nad rovinou s.
Pokud tedy kořen na s-rovině leží na levé straně, pak je řídicí systém stabilní. Relativní stabilitu systému lze tedy určit pomocí různých technik frekvenční odezvy, jako je Nyquistův graf, Bodeův graf a Nicholsův graf.
Nyquistovo kritérium stability
Nyquistovo kritérium stability se používá hlavně k rozpoznání existence kořenů pro charakteristické rovnice v konkrétní oblasti S-roviny. Nyquistovo kritérium stability jako N = Z – P to jednoduše říká. ‚N‘ je celkový počet obklíčení ohledně počátku, ‚P‘ je počet pólů a ‚Z‘ je celkový počet nul.
V případě 1: Když N = 0 (žádné obklíčení), tedy Z = P = 0 & Z = P.
Pokud N = 0, P by mělo být „0“, aby byl systém stabilní.
V případě 2: Když N je větší než 0 (obkroužení ve směru hodinových ručiček), tak P = 0, Z ≠0 & Z > P
V těchto dvou případech je systém nestabilní.
V případě 3: Když N je menší než 0 (obklopení proti směru hodinových ručiček), tak Z = 0, P ≠0 & P > Z
Systém je tedy stabilní.
Jak nakreslit Nyquistův spiknutí?
Kreslení nyquistovského grafu zahrnuje mnoho kroků, které jsou popsány níže.
- V kroku 1: Potřebujete zkontrolovat póly pro přenosovou funkci s otevřenou smyčkou, jako je G(s)H(s) v rovině „s“.
- V kroku 2: Vyberte správný Nyquistův obrys tak, že zahrnete celou pravou stranu roviny s jednoduchým nakreslením půlkruhu o poloměru ‚R‘, kde R má sklon k nekonečnu.
- V kroku 3: Rozpoznejte různé segmenty na obrysu s umístěním k Nyquistově cestě.
- V kroku 4: Mapovací segment musí projít segmentem jednoduchým nahrazením příslušné segmentové rovnice v mapovací funkci. Obecně musíme nakreslit polární grafy pro konkrétní segment.
- V kroku 5: Obecně platí, že mapování segmentů jsou odrážející obrazy mapování pro konkrétní dráhu kladné imaginární osy.
- V kroku 6: Půlkruhový pruh, který pokrývá pravou polovinu roviny, se normálně mapuje do bodu v rovině G(s) H(s).
- V kroku 7: Propojte všechny různé mapovací segmenty, abyste získali potřebný Nyquistův diagram.
- V kroku 8: Poznamenejte si ne. kruhů ve směru hodinových ručiček o (-1, 0) & rozhodnout o stabilitě pomocí N = Z – P.
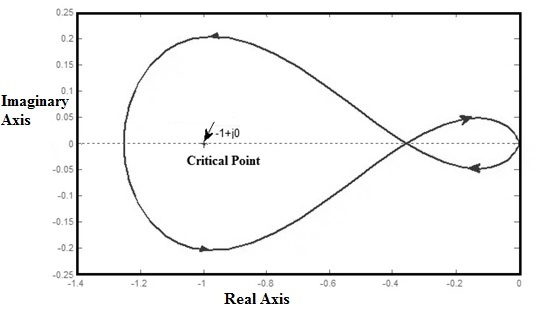
Jakmile je Nyquistův graf nakreslen, můžeme zjistit stabilitu řídicího systému s uzavřenou smyčkou pomocí Nyquistova kritéria stability. Pokud tedy kritický bod (-1+j0) leží na vnější straně obklíčení, pak je regulační systém s uzavřenou smyčkou zcela stabilní.
Přenosová funkce s otevřenou smyčkou je G(S)H(S) = N(S)/D(S).
Přenosová funkce v uzavřené smyčce je G(S)/1+ G(S)H(S).
N(s) = nula je nula otevřené smyčky a D(s) je pól otevřené smyčky.
Z hlediska stability nesmí žádné póly s uzavřenou smyčkou ležet na pravé straně roviny s. Charakteristická rovnice jako 1 + G(s) H(s) rovna nule znamená póly uzavřené smyčky.
Když 1 + G(s) H(s) je rovno nule, tak q(s) musí být nula.
Takže z hlediska stability by nuly q(s) neměly ležet v pravostranné rovině s-roviny.
Pro popis síly je třeba vzít v úvahu celou RHP. Představme si tedy půlkruh, který zahrnuje všechny body v RHP, a to tak, že vezmeme v úvahu poloměr půlkruhu ‚R‘, který má tendenci k nekonečnu.
Analýza stability s Nyquistovým grafem
Z Nyquistova grafu můžeme v závislosti na hodnotách parametrů rozpoznat, zda je řídicí systém stabilní, nestabilní nebo okrajově stabilní.
- Zisk frekvence přechodu a frekvence přechodu fáze.
- Rozpětí zisku a rozpětí fáze.
Frekvence přechodu fáze.
Frekvence, ve které se Nyquistův graf setkává se zápornou reálnou osou, se nazývá frekvence fázového křížení a označuje se ωpc.
Získejte přechodovou frekvenci
Frekvence, ve které má Nyquistův graf jednu velikost, se nazývá přechodová frekvence zisku a označuje se ωgc.
Stabilita řídicího systému založená na hlavním vztahu mezi dvěma frekvencemi, jako je fázové přechody a přechody zesílení, je diskutována níže.
- Pokud je ωpc vyšší ve srovnání s ωgc, pak je řídicí systém stabilní.
- Pokud je ωpc ekvivalentní ωgc, pak je řídicí systém mírně stabilní.
- Pokud je ωpc menší ve srovnání s ωgc, pak není řídicí systém stabilní.
Získejte marži
Rozpětí zisku je ekvivalentní převrácené hodnotě velikosti Nyquistova grafu při přechodové frekvenci fáze.
Marže zisku (GM) =1/Mpc
Kde „Mpc“ je velikost v normálním měřítku při ωpc nebo fázovém přechodovém kmitočtu
Rozpětí fáze
Fázová rezerva je ekvivalentní součtu 180 stupňů a fázového úhlu při ωgc nebo přechodové frekvenci zisku.
PM = 1800 + ϕgc
Kde ϕgc je fázový úhel při dělicí frekvenci zisku (ωgc).
Stabilita řídicího systému závisí na hlavním vztahu mezi dvěma mezemi, jako je zisk a fázové rozpětí uvedené níže.
Pokud je zisková rezerva vyšší než jedna a fázová rezerva je kladná, pak je řídicí systém stabilní.
Pokud je zisková marže ekvivalentní jedné a fázová marže je „0“ stupňů, pak je řídicí systém mírně stabilní.
Pokud je zisková rezerva nižší než jedna a fázová rezerva je záporná, pak není řídicí systém stabilní.
Nyquistův příklad problémů
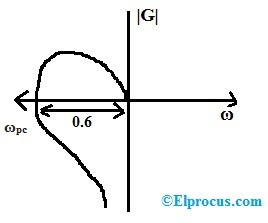
Ex1: Pokud Nyquistův graf prořízne zápornou reálnou osu ve vzdálenosti 0,6, jaká je zisková rezerva systému?
Víme, že ziskovou rezervu systému lze definovat jako velikost změny požadované v rámci zisku v otevřené smyčce, aby byl systém s uzavřenou smyčkou nestabilní.
Marže zisku nebo GM = 1/|G| wpc
Kde, zisk systému je |G| a wpc je fázová dělicí frekvence.
Fázovou dělicí frekvenci lze definovat jako; frekvence, ve které je zisk systému „0“.
Gm = 1/0,6 = 1,66
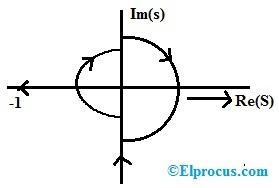
Ex2: Přenosová funkce systému s otevřenou smyčkou systému se zápornou zpětnou vazbou zisku jednoty může být dána jako G(s) = 1/S(S+1). Nyquistova křivka v rovině S zahrnuje celou rovinu pravé strany a malou oblast kolem počátku na levé straně, jak je znázorněno v následujícím grafu. Ne. obvodů bodu (-1+ j0) v G(S) Nyquistově grafu, ekvivalentní Nyquistově vrstevnici, která je označena jako „N“, pak „N“ ekvivalentní?
Ne. obvodů pro (-1+ j0) významný bod je dán pomocí N = P-Z.
Kde „N“ je počet obkroužení tohoto kritického bodu ve směru proti směru hodinových ručiček.
‚P‘ je počet pólů s otevřenou smyčkou na pravé straně roviny S.
„Z“ je počet pólů uzavřené smyčky na pravé straně roviny S.
N = P pro stabilitu Z = 0.
Výše uvedený vzorec je platný pouze tehdy, když je definována Nyquistova křivka pro pravou stranu roviny S a póly jsou vyloučeny u zdroje. Otáčení křivky by mělo být ve směru hodinových ručiček a obklíčení kritického bodu je ve směru proti směru hodinových ručiček.
G(s) = 1/S(S+l).
Póly s otevřenou smyčkou jsou přítomny při S = 0,-1
Přenosová funkce uzavřené smyčky = 1/S^2+S+1
Číslo uzavřeného pólu nad pravou stranou je nula.
Ale Nyquistův obrys je definován pro celkovou poloviční stranu S-roviny a obsahuje také pól v počátku.
Tudíž při S=0 je pól s otevřenou smyčkou považován za pól na pravé straně roviny S.
N = P-Z =>1-0 =>1
Výhody a nevýhody
The výhody Nyquistova pozemku zahrnout následující.
- Nyquistův graf je extrémně užitečný nástroj při určování stability systému.
- Má mnoho výhod oproti Routh-Horwitz & root locus, protože jednoduše spravuje časová zpoždění.
- Ale je to velmi užitečné, protože nám poskytuje metodu, jak využít Bodeův graf k rozhodování o stabilitě.
- Pomocí toho lze rozhodnout o stabilitě řídicího systému.
- Přenosová funkce s otevřenou smyčkou se zjistí pouhým měřením její frekvenční odezvy.
- Je lepší ve srovnání s kořenovým lokusem z hlediska časového zpoždění, což znamená, že Nyquistův graf může jednoduše spravovat časové zpoždění v systému.
- Dokáže lokalizovat frekvenční odezvu přenosové funkce s otevřenou smyčkou.
- Najde ne. z pólů dostupné póly na pravé straně roviny s.
- Zjistí relativní stabilitu systému/
The nevýhody Nyquistovy zápletky zahrnout následující.
- Nyquistův graf využívá některé obtížné matematické metody.
- Nemůže vyřešit úplnou sílu systému.
- Neposkytuje přesné informace o dostupných pólech na pravé straně roviny s.
Nyquist spiknutí aplikace
Aplikace Nyquistova spiknutí zahrnují následující.
- Nyquistův graf se používá ke stanovení stability systému prostřednictvím grafického procesu v rámci frekvenční domény.
- Nyquistův graf nebo graf frekvenční odezvy se používá hlavně v řídicí technice a zpracování signálu.
- Jedná se o rozšíření pro polární grafy, které se používá k nalezení stability řídicího systému s uzavřenou smyčkou.
- Je to mimořádně užitečný nástroj při určování stability systému.
- Pomocí Nyquistova grafu můžeme sledovat vzdálenost mezi dvěma body (–1, 0) a bodem, kde křivka protíná zápornou reálnou osu.
Jak se Nyquistův graf používá k určení stability?
Stabilitu lze určit pomocí Nyquistova grafu pouhým pohledem na ne. obvodů bodu (−1, 0). Různé zisky, na kterých bude systém stabilní, lze určit pohledem na skutečné křížení os. Tento graf poskytuje některá data týkající se tvaru přenosové funkce.
Jaká jsou Nyquistova kritéria pro odběr vzorků?
Nyquistova kritéria vyžadují, aby vzorkovací frekvence byla minimálně dvojnásobkem maximální frekvence obsažené v signálu. Pokud je vzorkovací frekvence nižší než dvojnásobek nejvyšší frekvence analogového signálu, dojde k jevu zvanému aliasing.
Co se používá pro Nyquist Plot?
Pro Nyquist Plot se používá funkce přenosu s otevřenou smyčkou.
Co je Nyquistovo pravidlo?
Nyquistovo pravidlo jednoduše říká, že periodický signál by měl být vzorkován při více než dvojnásobku maximální frekvenční složky signálu. Protože je dostupný čas omezený, vzorkovací frekvence je o něco vyšší, než vyžaduje.
Co je Nyquistův vzorec bitové rychlosti pro Noiseless?
Nyquist jednoduše uvádí, že v kanálu „B“ o šířce pásma můžete přenášet až 2B ortogonálních signálů za každou sekundu, tedy Rp ≤ 2B, kdekoli „Rp“ je tepová frekvence.
Co představuje Nyquistův děj?
Nyquistův graf představuje některé informace týkající se formy přenosové funkce. Tak například; tento graf poskytuje informaci o variaci mezi ne. pólů a nul přenosové funkce přes úhel, ve kterém křivka dosáhne počátku.
Tedy, toto je přehled Nyquistova pozemku – výhody, nevýhody a její aplikace. Nyquistovy grafy se používají pro analýzu vlastností řídicího systému, jako je stabilita, fázové rozpětí a zisk. Nyquist Plot pomocí Matlabu nám pomáhá při vytváření Nyquistova grafu souvisejícího s frekvenční odezvou generovanou prostřednictvím adynamického modelu. Zde je pro vás otázka, co je to bodový plán?