Víme, že roboti jsou pokročilá a vysoce inteligentní elektromechanická zařízení, která dokážou vykonávat řadu každodenních úkolů. Toto zařízení je schopno reagovat na své okolí a provádět akce k dosažení konkrétního úkolu. Roboty jsou vyrobeny z různých součástí, ale jednou z důležitých součástí je akční člen. Obecně se akční členy používají téměř v každém stroji kolem nás, jako jsou elektronické systémy kontroly přístupu, vibrátory mobilních telefonů, domácí spotřebiče, vozidla, roboty a průmyslová zařízení. Obecné příklady aktuátorů jsou; elektromotory , zvedací šrouby, krokové motory, svalové stimulátory v robotech a mnoho dalších. Tento článek poskytuje stručné informace o a robotický pohon – práce s aplikacemi.
Co je to robotický aktuátor?
Pohon, který se v robotech používá k otáčení kol robota nebo kloubů ramen robota nebo k otevírání/zavírání chapadla robota, se nazývá aktuátor robota. V závislosti na zatížení jsou k dispozici různé typy robotických pohonů. Obecně platí, že zatížení je spojeno s různými faktory, jako je točivý moment, síla, přesnost, rychlost provozu, spotřeba energie a přesnost. Pracovním principem robotického pohonu je přeměna energie na fyzický pohyb a většina pohonů generuje lineární nebo rotační pohyb.
Typy robotických aktuátorů
Robotické pohony jsou rozděleny do dvou typů podle požadavků na pohyb, jako je lineární pohyb a rotační pohyb.
Pro lineární pohyb:
Existují dva typy aktuátorů používaných v robotech pro lineární pohyb; lineární pohony a solenoidové pohony.
Lineární aktuátory
Lineární aktuátory v robotice se používají k tlačení nebo tažení robota, jako je pohyb vpřed nebo vzad a prodloužení paže. Aktivní konec tohoto pohonu je jednoduše připojen k ramenu robota, aby se aktivoval takový pohyb. Tyto aktuátory se používají v řadě aplikací v robotickém průmyslu.

Solenoidové aktuátory
Solenoidové aktuátory jsou speciální lineární aktuátory, které obsahují solenoidovou západku, která pracuje na elektromagnetické aktivitě. Tyto aktuátory se používají hlavně pro ovládání pohybu robota a také provádějí různé činnosti, jako je start a zpětný chod, západka, tlačítko atd. Solenoidy se běžně používají v aplikacích západek, ventilů, zámků a tlačítek, která jsou normálně řízená externím mikrokontrolérem.


Pro rotační pohyb:
Existují tři typy aktuátorů používaných v robotech pro rotační pohyb; Stejnosměrný motor, servomotor a krokový motor.
Pohony stejnosměrného motoru
Pohony stejnosměrného motoru se obecně používají pro otáčení robotického pohybu. Tyto pohony jsou k dispozici v různých velikostech se schopností generování točivého momentu. Lze jej tedy využít pro změnu rychlosti při rotačních pohybech. Pomocí těchto pohonů se provádějí různé činnosti, jako je robotické vrtání a pohyb robotického hnacího ústrojí.

Servopohony
Servomotorové aktuátory v robotice se používají hlavně k řízení a sledování rotačního pohybu. Jedná se o velmi špičkové stejnosměrné motory, které umožňují rotaci o 360 stupňů, ale trvalé otáčení není povinné. Tento pohon jednoduše umožňuje zastavení během rotačního pohybu. Pomocí tohoto pohonu provádí se činnost jako pick and place . Chcete-li vědět, jak a Vyberte N Umístěte robota práce klikněte na odkaz.

Akční členy krokových motorů
Akční členy krokových motorů pomáhají přispívat k opakujícím se rotačním činnostem v rámci robotů. Tyto typy pohonů jsou tedy kombinací jak stejnosměrných, tak servomotorových pohonů. Tyto aktuátory krokových motorů se používají v automatizačních robotech, kde je nezbytná opakovatelnost činnosti.

Konstrukce robotického ovladače
Víme, že v robotech se používají různé typy pohonů. Zde budeme diskutovat o tom, jak navrhnout lineární pohon, který se používá v robotice pro změnu rotačního pohybu na tahový/tlačný lineární pohyb. Tento pohyb lze tedy použít k posouvání, spouštění, naklánění nebo zvedání materiálů nebo strojů. Tyto aktuátory poskytují čisté a bezpečné ovládání pohybu, které je velmi účinné a bez údržby.

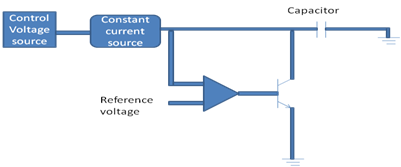
Napájení
Prvním kritériem při navrhování aktuátoru robota je výkon. Chcete-li získat mechanický výkon, je nezbytné mít napájení. Takže množství mechanického výkonu může být definováno zatížením nebo silou, která se má pohybovat.
Pracovní cyklus
Pracovní cyklus lze definovat jako jak často bude akční člen pracovat a jak dlouho bude spotřebovávat. Pracovní cyklus je určen teplotou pohonu, když je v pohybu, protože dochází ke ztrátě energie během tepla.
Když všechny akční členy nejsou stejné, pak existuje rozdíl v jejich pracovních cyklech. Dalším faktorem je zatížení, což platí zejména pro stejnosměrné motory, zatímco dalšími faktory, které mohou určovat pracovní cyklus, jsou charakteristiky zatížení, stáří a okolní teplota.
Účinnost
Účinnost pohonu jednoduše pomáhá pochopit, jak bude fungovat během provozu. Účinnost pohonu se tedy zjistí oddělením mechanické energie generované elektrickou energií.
Životnost aktuátoru
Existuje mnoho faktorů, které prodlouží životnost pohonu; setrvání ve jmenovitém pracovním cyklu, snížení bočního zatížení a setrvání v doporučeném napětí, síle a extrémních prostředích.
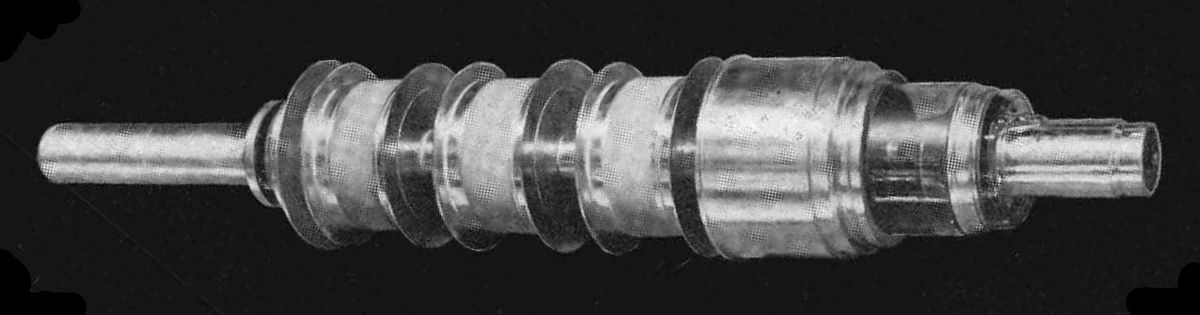
Pracovní
Robotické aktuátory jsou navrženy především pro snadné použití a efektivitu. Konstrukce lineárního robotického aktuátoru je nakloněná rovina, která začíná vodícím šroubem se závitem. Tento šroub poskytuje rampu pro generování síly, která funguje spolu s větší vzdáleností pro pohyb jakéhokoli nákladu. Hlavním účelem konstrukce aktuátoru robota je poskytovat tahový/tlačný pohyb. Energie potřebná k zajištění pohybu je tedy manuální nebo jakýkoli zdroj energie, jako je elektřina, tekutina nebo vzduch. Tyto akční členy se obecně pohybují autosedačky vpřed a vzad, automatické otevírání dveří, otevírání a zavírání počítačových diskových jednotek.
Selhání akčního členu robota
Selhání akčního členu robota se vyskytuje hlavně z mnoha důvodů. Takže tyto pohony mohou zaznamenat různé poruchy, jako jsou zaseknuté spoje nebo uzamčené, volně se kývající spoje a úplná nebo částečná ztráta účinnosti ovládání. Tyto poruchy tedy ovlivní chování robota, pokud řídicí jednotka robota nebyla navržena s dostatečnou odolností vůči poruchám.
Jak vybrat aktuátor pro vašeho robota?
Robotické akční členy se používají pro různé účely, takže při výběru takových aktuátorů je třeba vzít v úvahu mnoho aspektů
Účel a zamýšlená funkčnost
Potřebný typ pohonu pro konkrétní aplikaci závisí především na účelu robota a zamýšlené funkčnosti.
Fyzické požadavky a omezení
Kdykoli je rozhodnuto o použití typu pohonu, musí vývojáři zvážit fyzické požadavky a omezení. Protože hmotnost a fyzická velikost aktuátoru hraje klíčovou roli při uspořádání aktuátoru v robotu, může těžký aktuátor na malém robotickém rameni způsobit selhání ramene vlastní vahou.
Síla a síla
Na základě jejich konkrétního použití musí vývojáři zajistit sílu a výkon konkrétního aktuátoru, aby mohl daný úkol provést.
Komunikační protokol
Komunikační protokol je také třeba vzít v úvahu při výběru ovladače pro robota. Mnoho pohonů jednoduše podporuje komunikaci s PWM (pulzní šířková modulace), zatímco některé akční členy podporují sériovou komunikaci.
Montážní prostor a možnosti
Vývojáři by měli ověřit montážní prostor dosažitelný v nebo na robotu a možnosti montáže dané samotným pohonem. Protože některé typy pohonů jsou k dispozici se samostatným montážním hardwarem, který vám umožňuje namontovat jednotku v různých orientacích, zatímco jiné jsou k dispozici s integrovanými montážními body, které se instalují do konkrétní polohy a orientace.
Výhody
Výhoda robotického pohonu s zahrnují následující.
- Menší náklady
- Jeho údržba je snadná.
- Tyto jsou přesné.
- Snadné ovládání.
- Účinnost přeměny energie je vysoká.
- Bezpečné a jednoduché na obsluhu
- Méně hluku.
- Jsou velmi čisté a méně znečišťují atmosféru.
- Ty se velmi snadno udržují.
Nevýhody robotického pohonu zahrnout následující.
- Přehřívání v rámci pevně stanovených podmínek.
- Vyžaduje zvláštní bezpečnost v hořlavém prostředí.
- Potřebujete dobrou údržbu.
- Únik kapalin způsobí ekologické problémy.
- Hlasité & hlučné.
- Nedostatek kontroly přesnosti.
- Ty jsou velmi citlivé na vibrace.
Aplikace robotických aktuátorů
Aplikace robotických pohonů zahrnují následující.
- Aktuátor je velmi významnou součástí v robotice, která mění vnější energii na fyzický pohyb v závislosti na řídicích signálech.
- Elektrické aktuátory v robotice se používají ke změně elektrické energie na rotační nebo lineární pohyb
- Akční členy generují síly, které roboti využívají k pohybu sebe a jiných předmětů.
- Akční členy jsou spojeny s robotikou, zařízeními nebo protetickými pažemi, které se potřebují pohybovat a ohýbat.
- Lineární aktuátory v rámci robotiky mění elektrickou energii na lineární pohyb.
- Pohon je zodpovědný za ovládání a pohyb systému nebo mechanismu.
Takže je to všechno o robotovi akční člen – funkční s aplikacemi. Ovladač v robotu je základní komponentou, která funguje jako kloub pro robota, aby mohl pohybovat robotem, aby se mohl otáčet, napínat nahoru a dolů a přeměňovat energii na mechanické pohyby. . Nejběžnějším zdrojem energie pro pohon pohonů je elektřina, lze však využít i pneumatickou a hydraulickou energii. Některé unikátní hydraulické pohony se tedy používají k vytváření vysokého výkonu a jsou odolné proti nárazům. Zde je pro vás otázka, jaké různé komponenty se v robotech používají?