
Servo znamená řízení zpětné vazby snímání chyb, které se používá k opravě výkonu systému. Vyžaduje také obecně propracovaný řadič, často vyhrazený modul určený zejména pro použití se servomotory. Servomotory jsou stejnosměrné motory, které umožňují přesnou kontrolu úhlové polohy. Jsou to stejnosměrné motory, jejichž rychlost je pomalu snižována rychlostními stupni. Servomotory mají obvykle vypnutou otáčku od 90 ° do 180 °. Několik servomotorů má také mezní otáčky 360 ° nebo více. Servomotory se však netočí neustále. Jejich rotace je omezena mezi pevnými úhly.
Servomotor je sestava čtyř věcí: normální stejnosměrný motor, redukční jednotka, zařízení pro snímání polohy a ovládací obvod. Stejnosměrný motor je spojen s převodovým mechanismem, který poskytuje zpětnou vazbu senzoru polohy, kterým je většinou potenciometr. Z převodovky je výstup motoru dodáván prostřednictvím serva drážkování do ramene serva. U standardních servomotorů je převodovka obvykle vyrobena z plastu, zatímco u vysoce výkonných serv je převodovka vyrobena z kovu.
Servomotor se skládá ze tří vodičů - černý vodič připojený k zemi, bílý / žlutý vodič připojený k řídicí jednotce a červený vodič připojený k napájení.
Funkcí servomotoru je přijímat řídicí signál, který představuje požadovanou výstupní polohu servo hřídele, a napájet jeho stejnosměrný motor, dokud se jeho hřídel do této polohy neotočí.
Využívá zařízení pro snímání polohy k zjišťování polohy otáčení hřídele, takže ví, kterým směrem se musí motor otočit, aby se hřídel posunul do předepsané polohy. Hřídel se obvykle volně neotáčí podobně jako stejnosměrný motor, ale může se otáčet jen o 200 stupňů.

Servomotor
Z polohy rotoru se vytváří rotující magnetické pole, které účinně generuje toque. Proud proudí ve vinutí a vytváří rotující magnetické pole. Hřídel přenáší výstupní výkon motoru. Břemeno je poháněno přes přenosový mechanismus. Vysoce funkční vzácné zeminy nebo jiné permanentní magnety jsou umístěny externě na hřídeli. Optický kodér vždy sleduje počet otáček a polohu hřídele.
Práce se servomotorem
Servomotor se skládá ze stejnosměrného motoru, systému Gear, snímače polohy a řídicího obvodu. Stejnosměrné motory jsou napájeny z baterie a běží vysokou rychlostí a nízkým točivým momentem . Sestava ozubeného kola a hřídele připojená k stejnosměrným motorům snižuje tuto rychlost na dostatečnou rychlost a vyšší točivý moment. Snímač polohy snímá polohu hřídele z jeho konečné polohy a dodává informace do řídicího obvodu. Řídicí obvod odpovídajícím způsobem dekóduje signály z polohového snímače a porovná skutečnou polohu motorů s požadovanou polohou a podle toho řídí směr otáčení stejnosměrného motoru, aby získal požadovanou polohu. Servomotor obecně vyžaduje stejnosměrné napájení 4,8 V až 6 V.
Ovládání servomotoru
Servomotor je řízen ovládáním své polohy pomocí techniky pulzní šířkové modulace. Šířka pulzu aplikovaného na motor se mění a odesílá se po stanovenou dobu.
Šířka pulzu určuje úhlovou polohu servomotoru. Například šířka impulsu 1 ms způsobí úhlovou polohu 0 stupňů, zatímco šířka impulzu 2 ms způsobí úhlovou šířku 180 stupňů.
Výhody:
- Pokud je na motor umístěno velké zatížení, řidič zvýší proud do cívky motoru při pokusu o otáčení motoru. Neexistuje žádná podmínka mimo krok.
- Vysokorychlostní provoz je možný.
Nevýhody:
- Protože se servomotor snaží otáčet podle povelových pulzů, ale zaostává, není vhodný pro přesnou kontrolu otáčení.
- Vyšší náklady.
- Když se zastaví, rotor motoru se nadále pohybuje tam a zpět o jeden impuls, takže není vhodný, pokud potřebujete zabránit vibracím
7 Aplikace servomotorů
Servomotory se používají v aplikacích vyžadujících rychlé změny rychlosti, aniž by došlo k přehřátí motoru.
- V průmyslových odvětvích se používají v obráběcích strojích, balení, automatizaci továren, manipulaci s materiálem, zpracování tisku, montážních linkách a v mnoha dalších náročných aplikacích, jako je robotika, CNC stroje nebo automatizovaná výroba.
- Používají se také v rádiem řízených letadlech k řízení polohy a pohybu výtahů.
- Používají se v robotech kvůli jejich plynulému zapnutí a vypnutí a přesnému polohování.
- Používají se také v leteckém a kosmickém průmyslu k udržování hydraulické kapaliny ve svých hydraulických systémech.
- Používají se v mnoha rádiem ovládaných hračkách.
- Používají se v elektronických zařízeních, jako jsou DVD nebo přehrávače disků Blu-ray, k rozšíření nebo přehrávání přihrádek na disky.
- Používají se také v automobilech k udržení rychlosti vozidel.
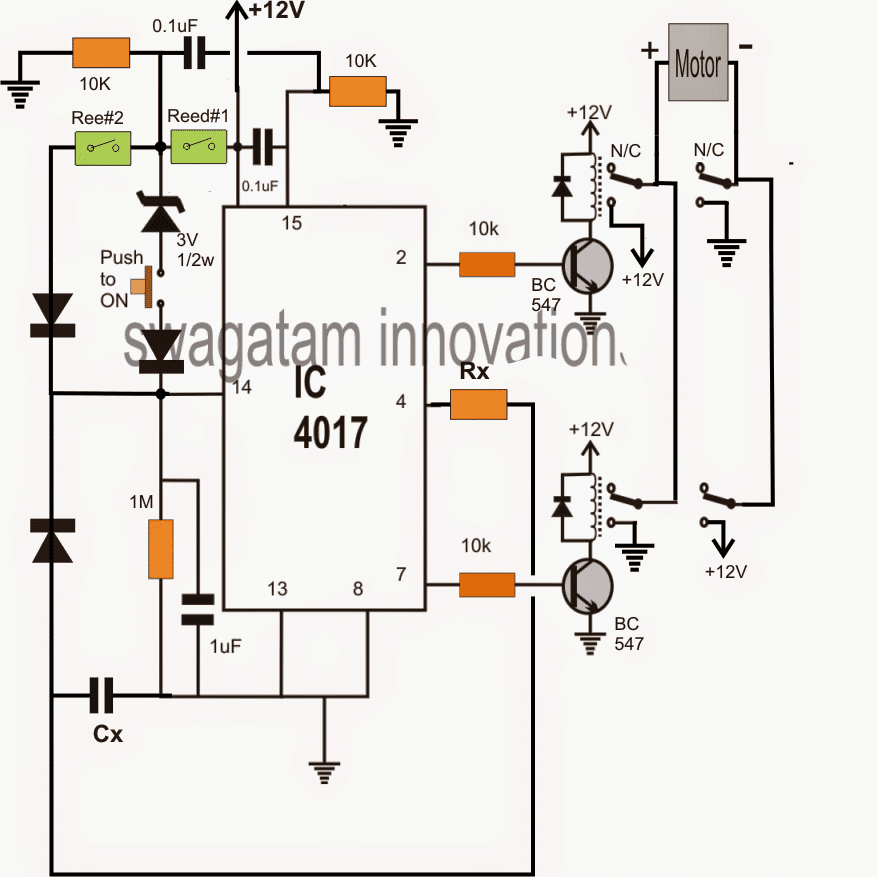
Aplikační obvod servomotoru
Z níže uvedeného aplikačního obvodu: Každý motor má tři vstupy: VCC, zem a signál periodické obdélníkové vlny. Šířka pulzu obdélníkové vlny určuje rychlost a směr servomotoru. V našem případě stačí změnit směr, aby se zařízení mohlo pohybovat dopředu, dozadu a otáčet se doleva a doprava. Pokud je šířka impulsu pod určitým časovým rámcem, motor bude jednat ve směru hodinových ručiček. Pokud šířka impulsu překročí tento časový rámec, motor bude jednat proti směru hodinových ručiček. Střední časový rámec lze nastavit pomocí vestavěného potenciometru uvnitř motoru.

3 rozdíly mezi krokovým motorem a servomotorem:
- Krokové motory mají velký počet pólů, magnetické páry generované permanentním magnetem nebo elektrický proud. Servomotory mají velmi málo pólů, každý pól nabízí přirozený bod zastavení hřídele motoru.
- Točivý moment krokového motoru při nízkých otáčkách je větší než u stejnosměrného servomotoru.
- Provoz krokového motoru je synchronizován výstupem povelových impulzních signálů z generátoru impulzů. Naproti tomu provoz servomotoru zaostává za povelovými impulsy.
Nyní máte představu o fungování servometru, pokud máte nějaké dotazy k tomuto tématu nebo pokud elektrické a elektronické projekty nechají níže uvedené komentáře.
Fotografický kredit
- Servomotor od Wikimedia







{kind=link}