
Definice
Bezkartáčový stejnosměrný motor se skládá z rotoru ve formě permanentního magnetu a statoru ve formě vícefázových vinutí kotvy. Liší se od běžného stejnosměrného motoru v tom, že neobsahuje kartáče a komutace se provádí elektricky pomocí elektronického pohonu pro napájení vinutí statoru.
BLDC motor lze v zásadě zkonstruovat dvěma způsoby - umístěním rotoru mimo jádro a vinutími v jádru a dalším umístěním vinutí mimo jádro. V předchozím uspořádání působí magnety rotoru jako izolátor, snižují rychlost odvádění tepla z motoru a pracují při nízkém proudu. Obvykle se používá u fanoušků. Ve druhém uspořádání motor odvádí více tepla, což způsobuje zvýšení jeho točivého momentu. Používá se v jednotkách pevného disku.

BLDC
Provoz čtyřpólového 2fázového motoru
Bezkartáčový stejnosměrný motor je poháněn elektronickým pohonem, který při otáčení rotoru přepíná napájecí napětí mezi vinutími statoru. Poloha rotoru je sledována převodníkem (optickým nebo magnetickým), který dodává informace do elektronického regulátoru, a na základě této polohy se určuje vinutí statoru, které má být napájeno. Tento elektronický pohon se skládá z tranzistorů (2 pro každou fázi), které jsou ovládány mikroprocesorem.

BLDC-DC
Magnetické pole generované permanentními magnety interaguje s polem indukovaným proudem ve vinutí statoru a vytváří mechanický moment. Elektronický spínací obvod nebo pohon přepíná napájecí proud do statoru tak, aby mezi interakčními poli udržoval konstantní úhel 0 až 90 stupňů. Hallovy snímače jsou většinou namontovány na statoru nebo na rotoru. Když rotor projde halovým senzorem, na základě severního nebo jižního pólu generuje vysoký nebo nízký signál. Na základě kombinace těchto signálů je definováno vinutí, které má být napájeno. Aby motor zůstal v chodu, magnetické pole vytvářené vinutími by se mělo posunout do polohy, jak se rotor pohybuje, aby dohnal pole statoru.

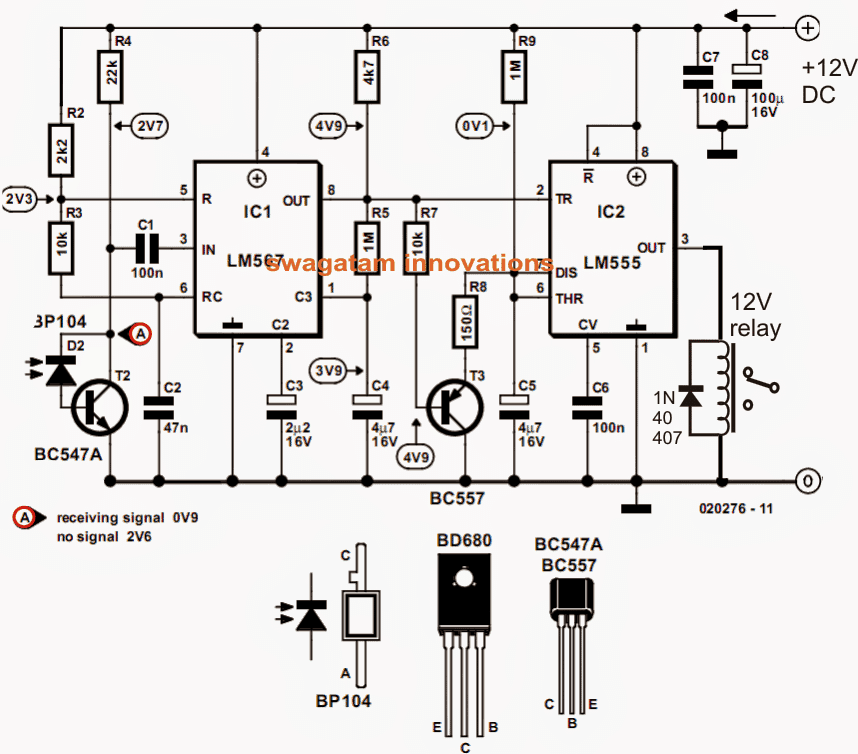
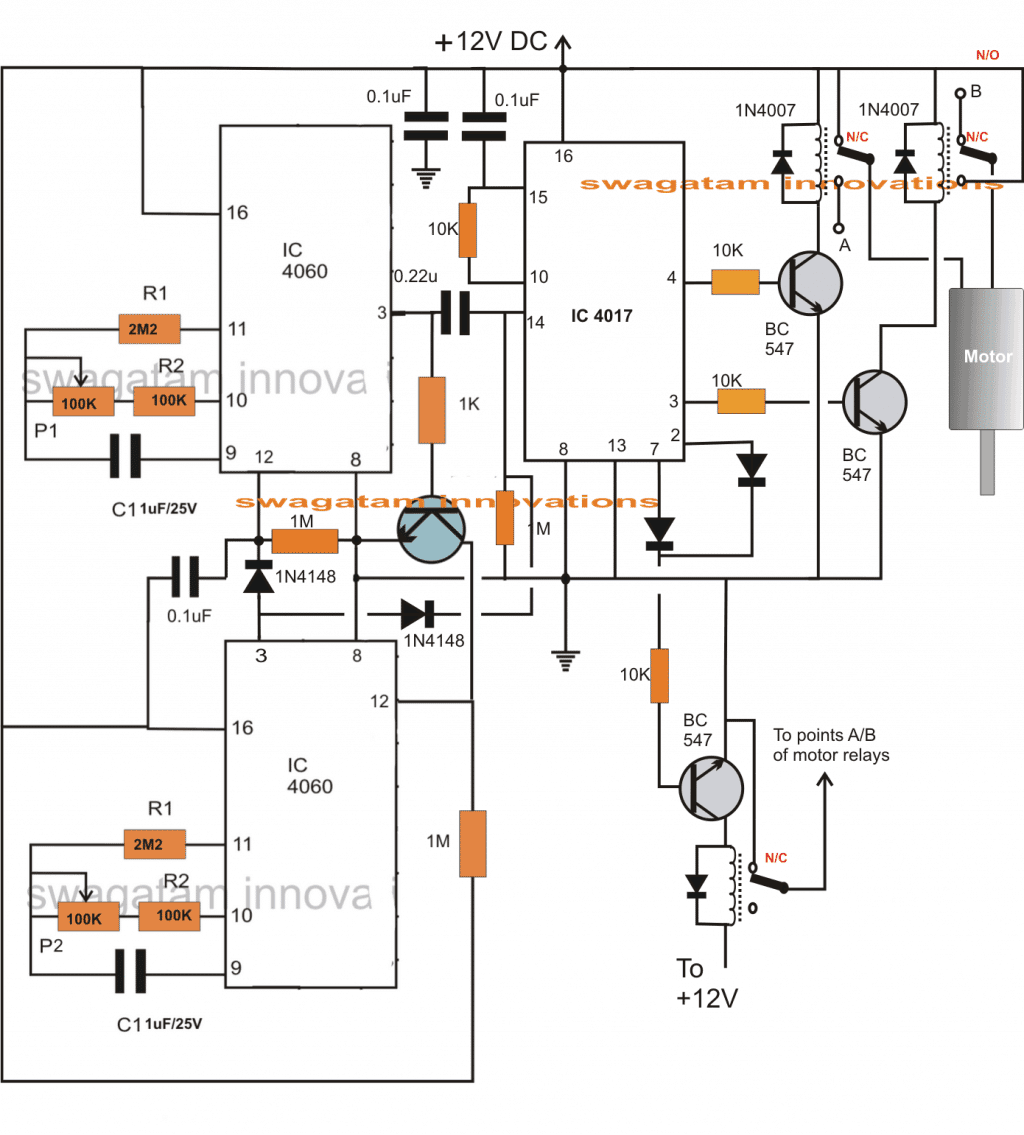
Obvod
Ve 4pólovém 2fázovém střídavém stejnosměrném motoru se používá jedno Hallovo čidlo, které je zabudováno do statoru. Při otáčení rotoru snímá halový senzor polohu a vyvíjí vysoký nebo nízký signál v závislosti na pólu magnetu (severní nebo jižní). Hallovo čidlo je připojeno přes odpor k tranzistorům. Když se na výstupu senzoru vyskytne signál vysokého napětí, tranzistor připojený k cívce A začne vodit, což poskytuje cestu pro tok proudu a tím energii cívky A. Kondenzátor se začne nabíjet na plné napájecí napětí. Když halový senzor detekuje změnu polarity rotoru, vyvíjí na svém výstupu nízkonapěťový signál a protože tranzistor 1 není napájen, je v odpojovacím stavu. Napětí vyvinuté kolem kondenzátoru je Vcc, což je napájecí napětí pro 2ndtranzistor a cívka B je nyní napájena, protože jím prochází proud.
BLDC motory mají pevné permanentní magnety, které se otáčejí a pevnou armaturu, což eliminuje problémy s připojováním proudu k pohybující se armatuře. A možná více pólů na rotoru než statorové nebo reluktanční motory. Ty druhé mohou být bez permanentních magnetů, pouze póly, které jsou indukovány na rotoru a poté jsou staženy do uspořádání pomocí časovaných statorových vinutí. Sestava kartáče / komutátoru kartáčovaného stejnosměrného motoru nahrazuje elektronický ovladač, který nepřetržitě přepíná fázi na vinutí, aby se motor stále točil. Regulátor provádí komparativní časovanou distribuci energie pomocí polovodičového obvodu namísto systému kartáče / komutátoru.

BLDC motor
7 výhod střídavých stejnosměrných motorů
- Lepší rychlost v porovnání s točivým momentem
- Vysoká dynamická odezva
- Vysoká účinnost
- Dlouhá životnost kvůli nedostatku ztrát elektrickým proudem a třením
- Bezhlučný provoz
- Vyšší rozsahy rychlostí
Aplikace:
Náklady na střídavý stejnosměrný motor klesly od jeho představení z důvodu pokroku v materiálech a designu. Toto snížení nákladů spolu s mnoha ohniskovými body, které má nad stejnosměrným motorem kartáčů, činí z bezkartáčového stejnosměrného motoru oblíbenou součást mnoha charakteristických aplikací. Aplikace, které používají motor BLDC, zahrnují, ale nejsou omezeny na:
- Spotřební elektronika
- Doprava
- Vytápění a větrání
- Průmyslové inženýrství
- Modelové inženýrství
Princip práce
Principy fungování BLDC motorů jsou stejné jako u kartáčovaného stejnosměrného motoru, tj. vnitřní zpětná vazba polohy hřídele. V případě kartáčovaného stejnosměrného motoru je zpětná vazba implementována pomocí mechanického komutátoru a kartáčů. V motoru BLDC je toho dosaženo pomocí více snímačů zpětné vazby. U motorů BLDC většinou používáme snímač s Hallovým efektem, kdykoli magnetické póly rotoru procházejí poblíž Hallova snímače, generují signál HIGH nebo LOW, který lze použít k určení polohy hřídele. Pokud se změní směr magnetického pole, obrátí se také vyvíjené napětí.
Ovládání BLDC motoru
Řídicí jednotka je implementována mikroelektronikou a má několik vyspělých technologií. To může být implementováno pomocí mikrokontroléru, vyhrazeného mikrokontroléru, drátové mikroelektronické jednotky, PLC nebo podobné jiné jednotky.
Analogový řadič stále používá, ale nemůže zpracovávat zpětnovazební zprávy a odpovídajícím způsobem řídit. U tohoto typu řídicích obvodů je možné implementovat vysoce výkonné řídicí algoritmy, jako je vektorové řízení, řízení orientované na pole, vysokorychlostní řízení, které všechny souvisí s elektromagnetickým stavem motoru. Dále je konvenčně implementováno ovládání vnější smyčky pro různé požadavky na dynamiku, jako je ovládání posuvného motoru, adaptivní řízení, prediktivní řízení ... atd.
Kromě toho všeho najdeme vysoce výkonné PIC (Power Integrated Circuit), ASIC (Application Specific Integrated Circuits)… atd. což může značně zjednodušit konstrukci řízení i výkonové elektronické jednotky. Například dnes máme kompletní PWM (Pulse Width Modulation) regulátor v jednom IC, který může v některých systémech nahradit celou řídicí jednotku. Složený ovladač IC může poskytnout kompletní řešení řízení všech šesti výkonových spínačů v třífázovém měniči. Existuje mnoho podobných integrovaných obvodů, které se každým dnem stále více přidávají. Na konci dne bude sestava systému pravděpodobně zahrnovat pouze část ovládacího softwaru se všemi hardwarem, které přicházejí do správného tvaru a formy.
K řízení rychlosti motoru lze použít vlnu PWM (Pulse Width Modulation). Zde je dáno průměrné napětí nebo se průměrný proud protékající motorem bude měnit v závislosti na době zapnutí a vypnutí pulzů ovládajících rychlost motoru, tj. Pracovní cyklus vlny řídí jeho rychlost. Při změně pracovního cyklu (doba zapnutí) můžeme změnit rychlost. Výměnou výstupních portů efektivně změní směr motoru.
Kontrola rychlosti
Regulace otáček motoru BLDC je nezbytná pro to, aby motor pracoval požadovanou rychlostí. Rychlost stejnosměrného stejnosměrného motoru lze regulovat řízením vstupního stejnosměrného napětí. Čím vyšší napětí, tím vyšší je rychlost. Když motor pracuje v normálním režimu nebo běží pod jmenovitou rychlostí, vstupní napětí kotvy se změní prostřednictvím modelu PWM. Když je motor provozován nad jmenovité otáčky, je tok zeslabován pomocí postupu odcházejícího proudu.
Regulace rychlosti může být uzavřená nebo otevřená.
Řízení rychlosti otevřené smyčky - zahrnuje jednoduché ovládání stejnosměrného napětí přivedeného na svorky motoru přerušením stejnosměrného napětí. To však má za následek určitou formu omezení proudu.
Regulace rychlosti uzavřené smyčky - Zahrnuje řízení vstupního napájecího napětí prostřednictvím zpětné vazby otáček z motoru. Napájecí napětí je tedy řízeno v závislosti na chybovém signálu.
Regulace rychlosti v uzavřené smyčce se skládá ze tří základních komponent.
- Obvod PWM pro generování požadovaných impulzů PWM. Může to být buď mikrokontrolér, nebo časovač IC.
- Snímací zařízení pro snímání skutečné rychlosti motoru. Může to být snímač s Hallovým efektem, infračervený snímač nebo optický kodér.
- Motorový pohon k řízení chodu motoru.
Tato technika změny napájecího napětí na základě chybového signálu může být buď pomocí techniky řízení pid, nebo pomocí fuzzy logiky.
Aplikace na řízení otáček střídavého stejnosměrného motoru

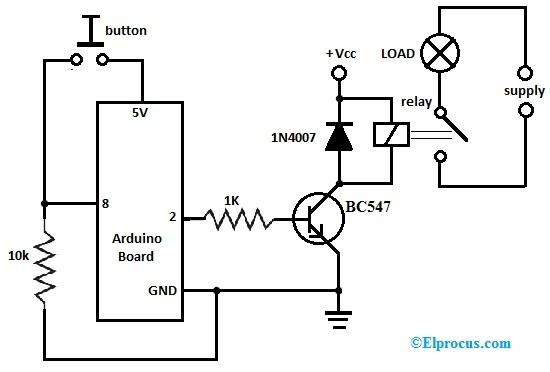
Řízení stejnosměrného motoru BLDC
Provoz motoru je řízen pomocí optočlenu a uspořádání MOSFET, kde je vstupní stejnosměrný výkon řízen technikou PWM z mikrokontroléru. Při otáčení motoru se infračervená LED přítomná na jeho hřídeli osvětlí bílým světlem v důsledku přítomnosti bílé skvrny na jeho hřídeli a odráží infračervené světlo. Fotodioda přijímá toto infračervené světlo a prochází změnou odporu, což způsobí změnu napájecího napětí k připojenému tranzistoru a mikrokontroléru je dán pulz, který generuje počet otáček za minutu. Tato rychlost se zobrazuje na LCD.
Požadovaná rychlost se zadává na klávesnici propojené s mikrokontrolérem. Rozdíl mezi snímanou rychlostí a požadovanou rychlostí je chybový signál a mikrokontrolér generuje signál PWM podle chybového signálu na základě fuzzy logiky, která poskytuje stejnosměrný příkon motoru.
Pomocí řízení s uzavřenou smyčkou lze tedy řídit otáčky stejnosměrného stejnosměrného motoru a lze jej otáčet libovolnou požadovanou rychlostí.
Fotografický kredit:






{kind=link}