Přestože obvody dálkového ovládání kvadrokoptéry lze snadno získat z trhu nebo z jakéhokoli online obchodu, vášnivému elektronickému fandovi nikdy není dovoleno naučit se, jak vlastně tyto funkce fungují a zda je lze postavit doma?
V tomto článku se pokusíme vytvořit jednoduchý obvod dálkového ovládání kvadrokoptéry pomocí diskrétních komponent a pomocí RF modulů dálkového ovládání a bez zapojení složitých obvodů založených na MCU.
Krok za krokem průvodce ve skutečnosti umožní zainteresovaným fandům pochopit, jak jednoduše lze ovládat kvadrokoptéru pomocí konceptu PWM.
Už jsme se poučili základy kvadrokoptéry Nyní prozkoumáme část dálkového ovládání, která nakonec pomůže dálkově létat s jednotkou.
Vyžadovány základní moduly
Hlavní složky, které mohou být pro projekt požadovány, jsou uvedeny níže:
Budeme zásadně vyžadovat následující 3 fáze okruhu:
1) 4cestné RF dálkové ovládání Tx, Rx moduly - 1set
2) Obvody generátoru PWM založené na IC 555 - 4nos
3) Obvody řadiče motoru BLDC - 4nos
Jelikož se jedná o domácí verzi, můžeme s navrhovaným designem očekávat určité neúčinnosti, například absenci joysticků pro ovládací prvky, které jsou nahrazeny potenciometry nebo potenciometry, nicméně lze očekávat, že pracovní schopnost systému bude na stejné úrovni jako profesionální jednotky.
Ruční vysílací jednotka PWM bude v zásadě sestávat z dálkového modulu Tx integrovaného do 4 diskrétních řídicích obvodů PWM, zatímco kvadrokoptéra bude muset být uzavřena s 1 obvodem Rx integrovaným do 4 diskrétních budicích obvodů BLDC.
Začněme s obvody motoru kvadrokoptéry a podívejme se, jak je třeba nakonfigurovat a připojit řadič motoru BLDC k obvodu Rx.
Obvod přijímače PWM kvadrokoptéry
V jednom z předchozích příspěvků jsme se dozvěděli, jak by bylo možné sestavit univerzální řadič motoru BLDC pomocí jediného čipu, avšak tento design není navržen pro provoz relativně těžších motorů kvadrokoptéry, proto nemusí být vhodný pro současnou aplikaci.
Možnost „velkého bratra“ pro výše uvedený okruh je naštěstí k dispozici a stává se dokonale vhodnou pro řízení quadcopterových motorů. Děkujeme společnosti TEXAS INSTRUMENTS za to, že nám poskytla takové nádherné jednočipové aplikace specifikované obvodové moduly.
Chcete-li se dozvědět více o tomto vysoce aktuálním integrovaném obvodu ovladače BLDC, můžete si přečíst jeho následující datový list pdf
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Níže uvedené nastavení ukazuje kompletní schéma zapojení ovladače ovladače kvadrokoptéry používající IC DRV11873, což je samostatný nízkoproudý BLDC motorový obvod skládající se ze všech požadovaných ochranných funkcí, jako je ochrana proti přetížení, tepelná ochrana atd. Tento modul v podstatě tvoří ESC pro naši současnou kvadrokoptéru.
Další informace o tomto designu a podrobnostech desek plošných spojů najdete v původním dokumentu níže:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Jak to funguje
FS a FG vývody IC jsou pro vylepšení IC s přidanými ovládacími prvky prostřednictvím externích obvodů, protože tyto funkce nepoužíváme v našem designu, tyto piny mohou být ponechány nevyužité a zakončené na kladnou linii přes 100K rezistor.
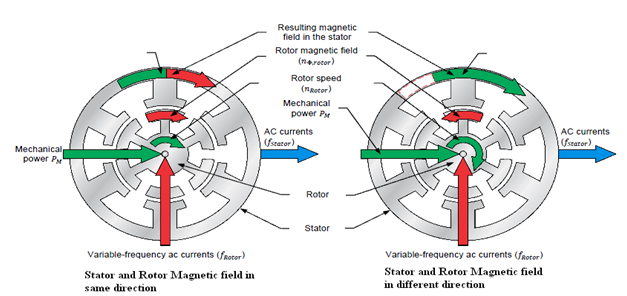
RD pinout IC určuje směr otáčení motoru. Připojení tohoto kolíku k Vcc pomocí 100K rezistoru umožňuje otáčení motoru proti směru hodinových ručiček, zatímco jeho ponechání bez připojení dělá opak a umožňuje motoru točit ve směru hodinových ručiček.
Pin # 16 je vstup PWM, který se používá pro vstřikování vstupu PWM z externího zdroje, přičemž měnící se pracovní cyklus PWM odpovídajícím způsobem mění otáčky motoru.
Pin, FR, CS jsou také irelevantní z důvodu potřeby, a proto mohou být ponechány nepoužívané, jak je znázorněno na obrázku, a zakončeny na kladnou linii přes 100K rezistor.
Pinouty U, V, W jsou výstupy motoru, které je třeba propojit s příslušným 3fázovým motorem kvadrokoptéry BLDC.
COM pinout je pro připojení společného vodiče třífázového motoru, pokud váš motor nemá společný vodič, můžete jej jednoduše simulovat připojením 3 nosů 2k2 rezistorů na piny U, W, W a poté připojit jejich společné končí pinem COM IC.
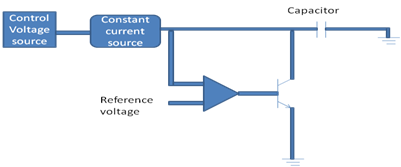
Schéma také ukazuje IC 555 nakonfigurovaný v režimu PWM Astable Circuit. To se stává součástí modulu obvodu a výstup PWM z jeho pinu č. 7 lze vidět propojený se vstupem PWM obvodu IC DRV, aby se inicializovaly 4 motory s konstantní základní rychlostí a aby se motor neustále vznášel rychlost na daném místě.
Tím se uzavírá hlavní obvod ELC nebo obvod ovladače BLDC pro návrh kvadrokoptéry.
Budeme potřebovat čtyři takové moduly pro čtyřmotorový motor v naší konstrukci kvadrokoptéry.
To znamená, že 4 takové DRV IC spolu se stupněm IC 555 PWM budou muset být spojeny s každým ze 4 motorů kvadrokoptéry.
Tyto moduly zajistí, že normálně jsou všechny 4 motory nastaveny na předem určenou rychlost aplikací pevné a identické PWM signálu na každý z příslušných integrovaných obvodů řadiče DRV.
Nyní se naučíme, jak lze změnit PWM pomocí dálkového ovladače, aby bylo možné měnit rychlosti jednotlivých motorů pomocí běžného čtyřkanálového dálkového ovladače.
RF přijímačový modul (PWM dekodér)

Výše uvedený obvod ukazuje přijímačový dálkový RF obvod, který má být umístěn uvnitř kvadrokoptéry pro příjem externích bezdrátových dat PWM z dálkového ovladače uživatele a poté odpovídajícím způsobem zpracovat signály, aby bylo možné napájet doprovodné moduly řadiče DRV, jak je vysvětleno v předchozí část.
4 výstupy pojmenované jako PWM # 1…. PWM # 4 musí být spojeny s PWM pinem # 15 na DRV IC, jak je uvedeno v předchozím schématu.
Tyto PWM pinouty z jednotky RF přijímače se aktivují, kdykoli uživatel stiskne příslušné tlačítko ve svém vysílači.
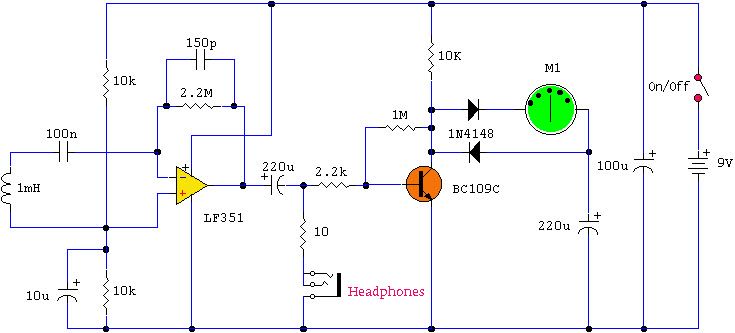
Jak je třeba zapojit RF vysílač (PWM Encoder)
Ve výše uvedené části jsme diskutovali o Rx nebo obvodu dálkového přijímače a o tom, jak je třeba spojit jeho 4 výstupy s moduly ovladače ESC ovladače kvadrokoptéry.
Zde vidíme, jak je třeba vytvořit jednoduchý vysokofrekvenční vysílač a propojit jej s obvody PWM pro bezdrátový přenos dat PWM do přijímače kvadrokoptéry, aby se rychlosti jednotlivých motorů ovládaly jednoduše stisknutím tlačítka, což nakonec způsobí Kvadrokoptéra pro změnu směru nebo rychlosti podle preferencí uživatelů.

Výše zobrazený obvod vykazuje podrobnosti o zapojení vysílacího modulu. Myšlenka vypadá docela jednoduše, hlavní obvod vysílače je tvořen čipem TSW434, který přenáší kódované signály PWM do atmosféry, a HT12E, který je odpovědný za přivádění kódovaných signálů do čipu TSW.
Signály PWM jsou generovány 4 samostatnými fázemi obvodu IC 555, které mohou být identické s tím, které bylo dříve popsáno v modulu řadiče DRV.
Obsah PWM 4 integrovaných obvodů lze vidět zakončený příslušnými vývody kodéru IC HT12E prostřednictvím 4 samostatných tlačítek označených jako SW1 ---- SW4.
Každé z těchto tlačítek odpovídá a přepíná identické pinout modulu přijímače, o kterém jsme hovořili dříve a označili jej jako PWM # 1, PWM # 2… .. PWM # 4.
Znamená to, že stisknutí SW1 může způsobit, že výstup PWM # 1 přijímací jednotky bude aktivní, a to způsobí, že pinout začne přivádět přijaté dekódované signály PWM z vysílače do přidruženého modulu DRV a následně způsobí odpovídající změnu odpovídající rychlosti příslušného motoru.
Podobně lze stisknutí SW2,3,4 použít k ovlivnění rychlosti dalších 3 kvadrokoptérových motorů podle přání uživatele.
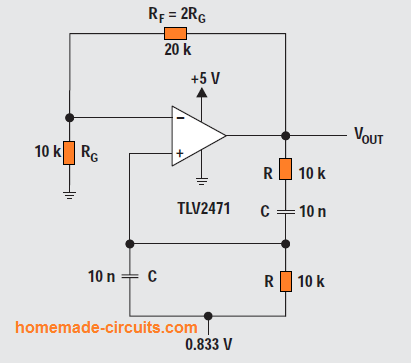
Obvod IC 555 PWM
4 obvody PWM zobrazené ve výše uvedeném sluchátku RF vysílače lze sestavit podle následujícího schématu, které je přesně podobné tomu, který byl viděn u našeho obvodu ESC ovladače DRV.

Pamatujte, že 5K hrnec může být ve formě obvyklého hrotu a tento hrnec lze použít navíc s tlačítky pro výběr různých rychlostí na příslušných motorech.
Znamená to, že když stisknete vybrané tlačítko a současně přesunete odpovídající 5KPWMpot, může kvadrokoptéra způsobit zvýšení nebo snížení rychlosti v zamýšleném směru.
Alternativně by mohl být PWM zpočátku nastaven na nějakou vyšší nebo nižší úroveň a poté stisknuto odpovídající tlačítko, aby příslušný kvadrokoptérový motor umožnil dosáhnout preferované rychlosti podle nastavení PWM.
Specifikace motoru kvadrokoptéry
Výše vysvětlený obvod dálkového ovládání Qiadcopter je určen k použití pouze pro účely zobrazení a nelze jej použít ke zvedání břemen nebo kamery. To znamená, že motory použité v konstrukci by měly být přednostně slaboproudé.
DRV11873 IC je navržen tak, aby fungoval pro motory s napětím 15 V, 1,5 A nebo s výkonem přibližně 20 wattů ... pro tento účel lze použít jakýkoli 3fázový BLDC motor s výkonem od 15 do 30 W.
Baterie pro tento design kvadrokoptéry může být jakákoli 12V Lipo pr Li-ion baterie schopná dodávat špičku 15V při trvalém proudu 1,5 A.
Podrobnosti specifikace
Miniaturní stejnosměrný motor 1306N Brushless Outrunner
Typ: Mikromotor
Konstrukce: permanentní magnet
Komutace: Bezkartáčový
Rychlost (RPM): 2200 ot./min
Trvalý proud (A): 1,5 ~ 2,6 A.
Napětí (V): 7,4 ~ 11,1V
miniaturní stejnosměrný motor: AX-1306N
hmotnost: 8 g
průměr hřídele: 1,5 mm
Baterie LI-PO: 2-3 s
provozní proud: 1,5 ~ 2,6A
maximální účinnost: 67%

Předchozí: Bezsenzorový obvod ovladače motoru BLDC Další: Obvod řídicí jednotky topení pomocí tlačítek