Stabilizátor napětí serva
Servo stabilizátor napětí je regulační mechanismus uzavřené smyčky, který slouží k udržení vyváženého 3 nebo jednofázového napěťového výstupu navzdory kolísání na vstupu v důsledku nevyvážených podmínek. Většina průmyslových zátěží jsou 3fázové indukční zátěže motorů a v reálném prostředí továrny je napětí ve 3 fázích zřídka vyvážené. Řekněme například, že pokud jsou naměřená napětí 420, 430 a 440V, průměr je 430V a odchylka 10V.
Procento nevyváženosti je dáno vztahem
(10 V X 100) / 430 V = 2,3% Je vidět, že 1% nevyváženost napětí zvýší ztráty motoru o 5%.
Nevyváženost napětí tak může zvýšit ztráty motoru ze 2% na 90%, a proto se také teplota nadměrně zvyšuje, což má za následek další zvýšení ztrát a snížení účinnosti. Proto se navrhuje zahájit projekt na udržení vyváženého výstupního napětí ve všech 3 fázích.
Jednofázový:
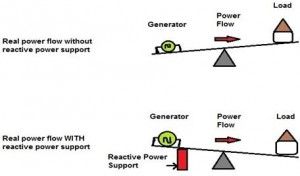
Je založen na principu vektorového přidání střídavého napětí na vstup, aby se získal požadovaný výstup pomocí transformátoru s názvem Buck-Boost transformátor (T), jehož sekundární je zapojen do série se vstupním napětím. Primární část stejného zdroje je napájena z proměnného transformátoru namontovaného na motoru (R). V závislosti na poměru primárního k sekundárnímu napětí přichází indukované napětí sekundárního proudu buď ve fázi, nebo mimo fázi na základě kolísání napětí . Variabilní transformátor je obvykle napájen ze vstupního napájení na obou koncích, zatímco poklepání na přibližně 20% vinutí je bráno jako pevný bod pro primární část transformátoru Buck-Boost. Variabilní bod autotransformátoru je proto schopen dodávat 20% z fázového napětí, které se používá pro buckový provoz, zatímco 80%, které je ve fázi se vstupním napětím a používá se pro zesilovací provoz. Pohyb stěrače variabilního transformátoru je řízen snímáním výstupního napětí do řídicího obvodu, který určuje směr otáčení synchronního motoru napájeného dvojicí TRIAC do jeho vinutí s rozdělenou fází.
3 fázově vyvážená korekce vstupu:
Pro provoz s nízkou kapacitou, řekněme asi 10 kVA, je v současné době vidět, že se používá variak s dvojitou ranou eliminující transformátor Buck-Boost na samotném variabilním transformátoru. To omezuje pohyb variaka na 250 stupňů, protože se váha používá pro sekundární vinutí. Přestože je tento systém ekonomický, má vážné nevýhody, pokud jde o jeho spolehlivost. Průmyslový standard takovou kombinaci nikdy nepřijímá. V oblastech přiměřeně vyváženého vstupního napětí se pro stabilizovaný výstup používají také třífázové servo řízené korektory, zatímco se používá jeden třífázový variak namontovaný jedním synchronním motorem a jednou řídicí kartou snímající dvoufázové napětí ze tří. To je mnohem ekonomičtější a užitečnější, pokud jsou vstupní fáze přiměřeně vyvážené. Má nevýhodu, že zatímco dochází k vážnému nevyvážení, výstup je proporcionálně nevyvážený.
3fázová nevyvážená korekce vstupu:
Tři řady transformátorů (T1, T2, T3), z nichž každá se používá druhá, jeden v každé fázi, který buď přidává nebo odečítá napětí od vstupního napájecího napětí, aby dodával konstantní napětí v každé fázi, čímž vytváří vyvážený výstup z nevyváženého vstupu. Vstup do primárního obvodu sériového transformátoru je napájen z každé fáze z jednoho proměnného autotransformátoru (Variac) (R1, R2, R3), jehož každý stěrač je spojen se synchronním motorem se střídavou fází (2 cívky) (M1, M2 M3). Motor přijímá střídavé napájení pro každou ze svých cívek prostřednictvím tyristorového přepínání buď ve směru hodinových ručiček, nebo proti směru hodinových ručiček, aby umožnil požadované výstupní napětí z variaku na primární část sériového transformátoru, ať už ve fázi nebo mimo fázi, k provádění sčítání nebo odčítání podle potřeby na sekundárním obvodu sériového transformátoru k udržení konstantního a vyváženého napětí na výstupu. Zpětná vazba z výstupu do řídicího obvodu (C1, C2, C3) je porovnávána s pevným referenčním napětím pomocí komparátorů úrovně vytvořených z operačních zesilovačů, aby nakonec spustila TRIAC podle potřeby ovládání motoru.
Toto schéma se skládá hlavně z řídicího obvodu, jednofázového servoindukčního motoru připojeného k primárnímu napájení variaku sériového transformátoru pro každou fázi.
- Řídicí obvod skládající se z okenního komparátoru zapojeného kolem tranzistorů a zesílení chybového signálu RMS signálem pomocí IC 741 je upraven v Multisimu a je simulován pro různé vstupní provozní podmínky zajišťující odpálení TRIAC, které by pracovaly s fázově posunutým indukčním motorem v požadovaném směru který ovládá otáčení variačního stěrače.
- Na základě maximálních a minimálních hodnot kolísání napětí jsou sériový transformátor a řídicí transformátory navrženy pomocí standardního vzorce přizpůsobeného komerčně dostupnému železnému jádru a velikosti super smaltovaného měděného drátu před navinutím pro použití v projektu.
Technologie:
Ve vyváženém 3fázovém napájecím systému mají všechna napětí a proudy stejnou amplitudu a jsou od sebe fázově posunuty o 120 stupňů. To však není možné prakticky, protože nevyvážené napětí může mít nepříznivé účinky na zařízení a elektrický rozvod.
Za nevyvážených podmínek způsobí distribuční systém více ztrát a tepelných účinků a bude méně stabilní. Účinek napěťové nevyváženosti může být také nepříznivý pro zařízení, jako jsou indukční motory, výkonové elektronické měniče a pohony s nastavitelnou rychlostí (ASD). Relativně malé procento nesymetrie napětí u třífázového motoru má za následek výrazné zvýšení ztrát motoru, což má za následek také snížení účinnosti. Náklady na energii lze v mnoha aplikacích minimalizovat snížením ztrátového příkonu motoru z důvodu nevyváženosti napětí.
Procentuální nevyváženost napětí je definována NEMA jako 100násobek odchylky síťového napětí od průměrného napětí děleno průměrným napětím. Pokud jsou naměřená napětí 420, 430 a 440V, průměr je 430V a odchylka 10V.
Procentní nevyváženost je dána vztahem (10 V * 100/430 V) = 2,3%
1% nevyváženost napětí tedy zvýší ztráty motoru o 5%.
Proto je nevyváženost vážným problémem s kvalitou elektrické energie, který ovlivňuje zejména nízkonapěťové distribuční soustavy, a proto se v projektu navrhuje udržovat vyvážené napětí o velikosti v každé fázi, čímž se udržuje vyvážené síťové napětí.
ÚVOD:
A.C. Stabilizátory napětí jsou určeny pro získání stabilizovaného střídavého proudu napájení z kolísání příchozí sítě. Najdou uplatnění v každé oblasti elektrotechniky, elektroniky a mnoha dalších průmyslových odvětvích, výzkumných institucí, zkušebních laboratoří, vzdělávacích institucí atd.
Co je nevyváženost:
Podmínkou nevyváženosti se rozumí stav, kdy 3fázová napětí a proudy nemají stejnou amplitudu ani stejný fázový posun.
Pokud není splněna jedna nebo obě tyto podmínky, systém se nazývá nevyvážený nebo asymetrický. (V tomto textu se implicitně předpokládá, že křivky jsou sinusové a neobsahují tedy harmonické.)
Příčiny nevyváženosti:
Provozovatel systému se snaží zajistit vyvážené systémové napětí na PCC mezi distribuční sítí a interní sítí zákazníka.
Výstupní napětí v třífázovém systému závisí na výstupním napětí generátorů, impedanci systému a zatěžovacím proudu.
Jelikož se však používají většinou synchronní generátory, generovaná napětí jsou vysoce symetrická, takže generátory nemohou být příčinou nevyváženosti. Připojení na nižších úrovních napětí mají obvykle vysokou impedanci, což vede k potenciálně větší nerovnováze napětí. Impedance systémových komponent je ovlivněna konfigurací venkovního vedení.
Důsledky nevyváženosti napětí:
Citlivost elektrického zařízení na nevyváženost se u jednotlivých spotřebičů liší. Krátký přehled nejběžnějších problémů je uveden níže:
a) Indukční stroje:
Jedná se o střídavý proud synchronní stroje s vnitřně indukovanými rotujícími magnetickými poli, jejichž velikost je úměrná amplitudě přímých a / nebo inverzních složek. Proto v případě nevyváženého napájení se rotující magnetické pole stává eliptickým místo kruhového. indukční stroje tedy čelí hlavně třem druhům problémů v důsledku nevyváženosti napětí
1. Za prvé, stroj nemůže produkovat svůj plný točivý moment, protože inverzně rotující magnetické pole systému se zápornou sekvencí vytváří záporný brzdný moment, který se musí odečíst od základního točivého momentu spojeného s normálním rotujícím magnetickým polem. Následující obrázek ukazuje různé charakteristiky prokluzu točivého momentu indukčního stroje při nevyváženém napájení

2. Zadruhé, ložiska mohou utrpět mechanické poškození v důsledku indukovaných složek točivého momentu při dvojnásobné frekvenci systému.
3. Nakonec jsou stator a zejména rotor nadměrně zahřátý, což může vést k rychlejšímu tepelnému stárnutí. Toto teplo je způsobeno indukcí významných proudů rychle rotujícím (v relativním smyslu) inverzním magnetickým polem, jak je vidět na rotoru. Aby bylo možné zvládnout toto dodatečné vytápění, musí být motor zbavený jmenovité hodnoty, což může vyžadovat instalaci stroje s větším jmenovitým výkonem.
TECHNO-EKONOMIKA:
Napěťová nerovnováha může způsobit předčasné selhání motoru, což vede nejen k neplánovanému odstavení systému, ale také k velkým ekonomickým ztrátám.
Účinky nízkého a vysokého napětí na motory a související změny výkonu, které lze očekávat, když použijeme jiná napětí, než která jsou uvedena na typovém štítku, jsou uvedeny následovně:
Účinky nízkého napětí:
Když je motor vystaven napětí pod jmenovitou hodnotou na štítku, některé charakteristiky motoru se mírně změní a jiné se dramaticky změní.
Množství energie odebrané z linky musí být stanoveno pro pevnou velikost zátěže.
Množství energie, které motor odebírá, má hrubou korelaci s napětím na proud (ampéry).
Chcete-li zachovat stejné množství energie, je-li napájecí napětí nízké, slouží jako kompenzace zvýšení proudu. Je to však nebezpečné, protože vyšší proud způsobuje, že se v motoru hromadí více tepla, které motor nakonec zničí.
Nevýhody použití nízkého napětí jsou tedy přehřátí motoru a motor je poškozen.
Počáteční točivý moment, točivý moment a výsuvný točivý moment hlavní zátěže (indukční motory), na základě aplikovaného napětí na druhou.
Obecně může 10% snížení jmenovitého napětí vést k nízkému počátečnímu točivému momentu, k vytažení a vytažení točivého momentu.
Účinky vysokého napětí:
Vysoké napětí může způsobit nasycení magnetů, což způsobí, že motor odebírá nadměrný proud, aby magnetizoval železo. Vysoké napětí tak může také vést k poškození. Vysoké napětí také snižuje účiník, což vede ke zvýšení ztrát.
Motory budou tolerovat určité úpravy napětí nad návrhovým napětím. Když extrémy nad návrhovým napětím způsobí nárůst proudu s odpovídajícími změnami ohřevu a zkrácením životnosti motoru.
Citlivost napětí ovlivňuje nejen motory, ale i další zařízení. Solenoidy a cívky v relé a spouštěčích snášejí nízké napětí lépe než vysoké napětí. Dalšími příklady jsou předřadníky ve fluorescenčních, rtuťových a vysokotlakých sodíkových světelných zařízeních a transformátorech a žárovkách.
Celkově je pro zařízení lepší, když změníme odbočky na vstupních transformátorech, abychom optimalizovali napětí na podlaze elektrárny na něco blízkého jmenovitým hodnotám zařízení, což je hlavní koncept za navrhovanou koncepcí stabilizace napětí v projektu.
Pravidla pro rozhodování o napájecím napětí
- Malé motory mají tendenci být citlivější na přepětí a saturaci než velké motory.
- Jednofázové motory mají tendenci být citlivější na přepětí než třífázové motory.
- U-rámové motory jsou méně citlivé na přepětí než T-rámy.
- Motory Super-E s vysokou účinností jsou méně citlivé na přepětí než motory se standardní účinností.
- 2 a 4-pólové motory mají tendenci být méně ovlivňovány vysokým napětím než 6- a 8-pólové konstrukce.
- Přepětí může zvýšit intenzitu proudu a teplotu i na lehce zatížených motorech
- Účinnost je také ovlivněna tím, jak se snižuje s nízkým nebo vysokým napětím
- Účiník se snižuje s vysokým napětím.
- Náběhový proud stoupá s vyšším napětím.
Získejte více znalostí o různých elektronických konceptech a obvodech provedením mini projekty elektroniky na inženýrské úrovni.