Je velmi zajímavé pracovat s robotem technologie dálkového ovládání - zda je robot používán pro zábavné herní aplikace nebo pro technické operace automatizace domácnosti a průmyslové aplikace (pick and place robot, řádek následující robot , detektor kovů robotické vozidlo, IR řízené robotické vozidlo, hasicí robotické vozidlo , robotické vozidlo ovládané mobilním telefonem, špionážní robot válečného pole s bezdrátovou kamerou pro noční vidění, robotické vozidlo ovládané hlasem) a tak dále].
Kroky k vytvoření robotického těla a mechanického systému dálkového ovládání jsou velmi zajímavé pro fanoušky elektrické energie a elektroniky a studenty. Ale v tomto článku uvádíme podrobný a snadno srozumitelný postupný popis výroby robota na dálkové ovládání. Tělo robota je obecně konstruováno pomocí koleček, kovových pásků, kovové nebo plastové desky, Stejnosměrné motory , diskrétní součásti, spojovací vodiče, matice a šrouby.
Zde uvedené podrobné pokyny vám pomohou profesionálně si vyrobit robota na dálkové ovládání. Můžete se naučit, jak vyrobit tělo robota, stejně jako jeho mechanismus dálkového ovládání s daným infografika . Tento článek určitě poskytuje technické dovednosti potřebné pro výrobu robota na dálkové ovládání.
Poznámka: Tato infografika robota s dálkovým ovládáním je čistě pro studenty inženýrství a elektronické nadšence a není určena pro komerční účely. (Platí podmínky - Nepokoušejte se provádět kroky uvedené v tomto článku sami, pokud nevíte, jak zacházet s elektrickými a elektronické obvody ).
8 kroků k návrhu robota na dálkové ovládání
Krok 1: Poznejte aplikaci robota a začněte analyzovat tělo robota
Především musíte znát aplikaci, pro kterou se chystáte robot na dálkové ovládání navrhnout. Na základě aplikace musíte navrhnout tělo robota. Zde diskutujeme o tom, jak vyrobit IR dálkově ovládané robotické vozidlo.
Krok 2: Shromážděte hardwarové komponenty potřebné k výrobě těla robota
Po rozhodnutí o aplikaci robota shromážděte všechny požadované součásti těla robota, jako je plastová deska, kola, kovové pásy, stejnosměrné motory a všechny ostatní součásti, abyste vytvořili tělo robota.
Krok 3: Postavte tělo robota
Opravte shromážděné komponenty a vytvořte tělo robota. Připevněte kola pomocí kovových pásků, stejnosměrných motorů a dokončete celou sestavu robotického těla dokončením, pájením a lepením.
Krok 4: Vyberte technologii dálkového ovládání
Po navržení celého těla robota musíte robota ovládat pomocí techniky dálkového ovládání. Vyberte příslušnou technologii dálkového ovládání podle požadavků aplikace. K ovládání robota můžete použít infračervené dálkové ovládání TV nebo IR dálkové ovládání.
Krok 5: Analyzujte a navrhněte obvod dálkového ovládání
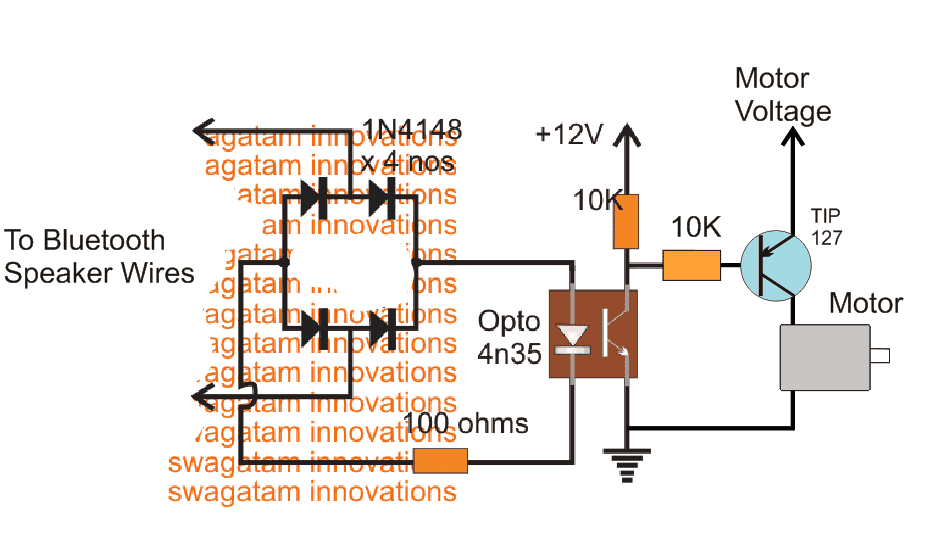
Analyzujte komponenty potřebné k návrhu obvodu dálkového ovládání pro ovládání robota pomocí infračervené technologie. Poté navrhněte obvod a nainstalujte součásti na desku plošných spojů. Dále řádným způsobem připájejte součásti obvodu.
Krok 6: Odhadněte komunikační technologii pro dálkové ovládání
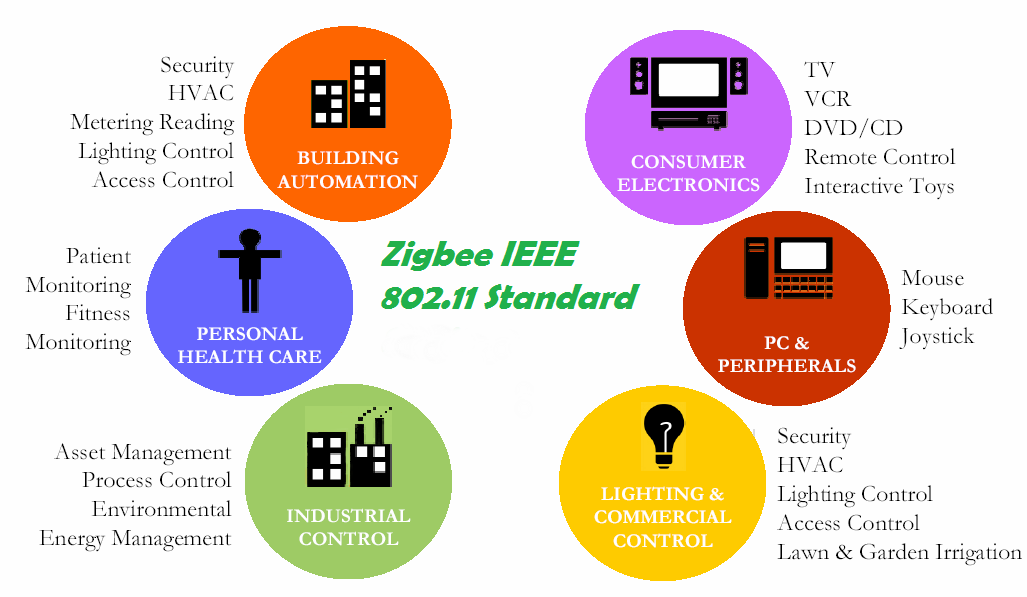
K dálkovému ovládání robota je nutný komunikační systém. Pro návrh systému dálkového ovládání existují různé typy komunikace. Na základě požadavku, jako je dosah, do kterého je dálkové ovládání určeno, požadavek na přímou viditelnost atd., Musíte zvolit vhodnou technologii dálkového ovládání. Můžete použít IR vzdálenou technologii je použita.
Krok 7: Navrhněte systém IR dálkového ovládání
Systém infračerveného dálkového ovládání se skládá z konce vysílače a konce přijímače. Konec vysílače používá řídicí jednotka a konec přijímače je připojen k robotu.
Krok 8: Ovládejte robota pomocí dálkového ovládání
Robot lze dálkově ovládat pomocí tlačítek infračerveného vysílače. Po stisknutí těchto tlačítek se do přijímače robota odešlou příslušné příkazy k pohybu robota směrem dopředu, dozadu, doleva nebo doprava.

Vložte tento obrázek na své stránky (zkopírujte kód níže):