Propojení stejnosměrného motoru s mikrokontrolérem je velmi důležitým konceptem v mnoha průmyslových a robotických aplikacích. Propojením stejnosměrného motoru s mikrokontrolérem můžeme řídit směr motoru, řídit otáčky motoru. Tento článek vás popisuje, Řízení otáček stejnosměrného motoru pomocí mikrokontroléru 8051 pomocí ovladače Bluetooth Android. Blokové schéma je zobrazeno níže.

Blokové schéma řízení otáček stejnosměrného motoru pomocí aplikace pro Android
Řízení rychlosti stejnosměrného motoru pomocí aplikace pro Android
Řízení rychlosti stejnosměrného motoru pomocí mobilního zařízení Android má mnoho aplikací, jako jsou průmyslové aplikace, eskalátory, výtahy, robotické aplikace a aplikace bezpečnostních systémů. Uživatel si musí na svůj smartphone se systémem Android nainstalovat aplikaci pro Android.
Uživatel může posílat pokyny pro řízení rychlosti stejnosměrného motoru. Bezdrátová komunikace Bluetooth se používá k odesílání příkazů uživateli a řadiči. Hlavní hardwarové komponenty obvodu jsou mikrokontrolér 8051, ovladač motoru L293D IC, stejnosměrný motor, modul Bluetooth a smartphone Android.
Další informace naleznete na tomto odkazu 8051 Historie a základy mikrokontroléru
Maximální výstupní proud pinu mikrokontroléru je 15 mA při 5 V, ale nedělá to funkci stejnosměrného motoru a dokonce i zadní EMF (elektromotorická síla), kterou motor produkuje, může mikrokontroléru ublížit.
Proto není vhodné propojovat stejnosměrný motor přímo s mikrokontrolérem. Takže obvod řidiče motoru (L293D IC) je zvyklý rozhraní stejnosměrného motoru a mikrokontroléru .
Řidič motoru (L293D)
L293D je integrovaný obvod ovladače motoru s dvojitým H-můstkem (IC). Budiče motoru fungují jako proudové zesilovače, protože přijímají řídicí signál malého proudu a poskytují signál vyššího proudu. Tento signál vyššího proudu se používá k pohonu motorů. L293D obsahuje dva vestavěné budicí obvody H-můstku . V běžném provozním režimu mohou být současně poháněny dva stejnosměrné motory, a to jak vpřed, tak i vzad. Provoz motoru dvou motorů lze ovládat vstupní logikou na pinech 2 a 7 a 10 a 15.
Vstupní logika 00 nebo 11 zastaví příslušný motor. Logika 01 a 10 ji budou otáčet ve směru hodinových ručiček a proti směru hodinových ručiček. Aby mohly motory začít pracovat, musí být kolíky 1 a 9 (odpovídající dvěma motorům) vysoké. Když je vstup povolení vysoký, přidružený ovladač se povolí.
Výsledkem je, že výstupy se stanou aktivními a pracují s jejich vstupy ve fázi. Podobně, když je vstup povolení nízký, je tento ovladač deaktivován a jejich výstupy jsou vypnuté a ve stavu vysoké impedance. Pinový diagram a vnitřní struktura L293D IC jsou zobrazeny níže.

Pinový diagram a vnitřní struktura IC L293D
Co je to Android?
The Operační systém Android funguje na bázi Linuxu a je určen především pro mobilní zařízení s dotykovou obrazovkou, jako jsou chytré telefony a tablety. Jedním z nejpoužívanějších mobilních operačních systémů v dnešní době je Android. Android je software, který byl založen v kalifornském Palo Alto v roce 2003.

Android Mobile
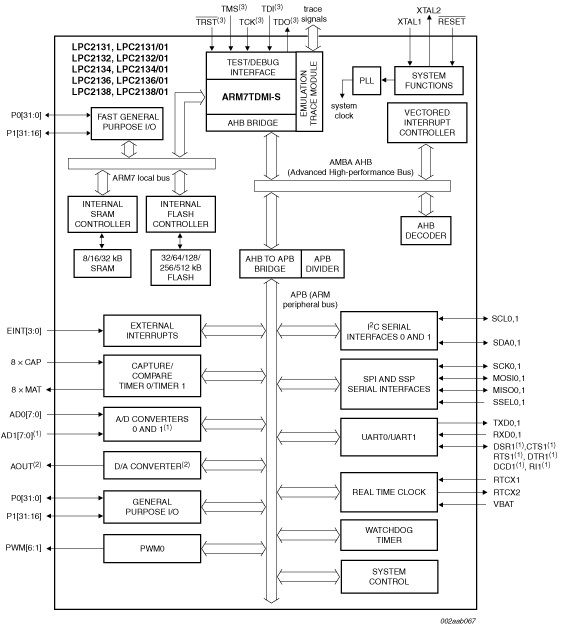
Android je výkonný operační systém a podporuje velké množství aplikací ve smartphonech. Tyto aplikace jsou pro uživatele pohodlnější a pokročilejší. Hardware, který podporuje software pro Android, je založen na ARM architektura platforma .
Android je operační systém s otevřeným zdrojovým kódem, což znamená, že je zdarma a může jej používat kdokoli. Android má k dispozici miliony aplikací, které vám mohou pomoci spravovat váš život tak či onak, a na trhu je k dispozici za nízkou cenu, a proto je Android velmi populární.
Schematické vysvětlení vysvětlení regulace otáček stejnosměrného motoru
Níže je uvedeno schematické schéma řídicího obvodu otáček stejnosměrného motoru a vysvětlení provozu.

Schematický diagram
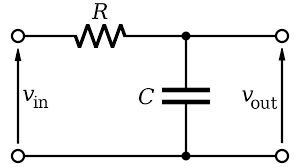
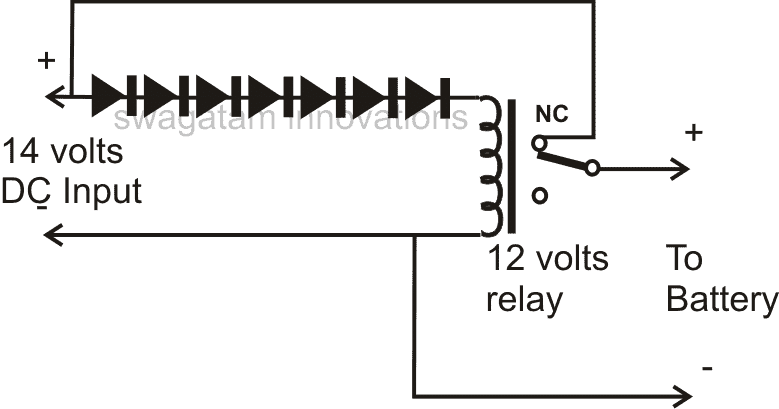
Obvod využívá standardní napájecí zdroj sestávající z sestupného transformátoru od 230 V do 12V a 4 diod tvořících můstkový usměrňovač, který dodává pulzující stejnosměrný proud, který je poté filtrován elektrolytický kondenzátor přibližně 470 uF až 1 000 uF.
Filtrovaný stejnosměrný proud je neregulovaný, IC LM7805 se používá k získání konstanty 5V DC na svém pinu č. 3. Regulovaných 5V DC je dále filtrováno malým elektrolytickým kondenzátorem 10µF pro jakýkoli hluk takto generovaný obvodem.
Řídicí signál ze zařízení Android bude odeslán přes Bluetooth. Tento signál bude komunikován s mikrokontrolérem pomocí vysílače a přijímače obou zařízení. Tento signál bude označen jediným písmenem, které řídí rychlost a směr motoru.
Jak řídit rychlost stejnosměrného motoru? V tomto projektu je hlavním pracovním principem generování pulzů PWM z naprogramovaného mikrokontroléru, který umožňuje kolíku 1 L293D zvýšit a snížit pracovní cyklus pulzů. Tyto pracovní impulsy mohou vést k pohánění stejnosměrného motoru správným směrem se specifickými otáčkami.
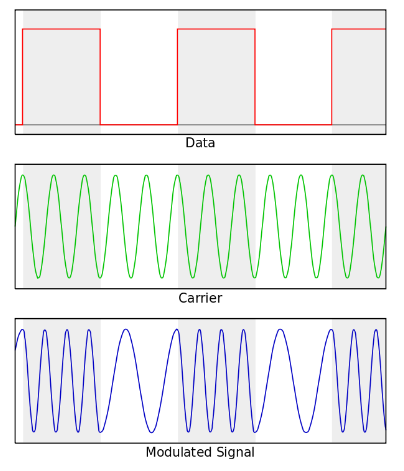
Modulace šířky pulzu
Pulzní šířková modulace je dosažen z výstupu mikroprocesoru, který je řádně naprogramován tak, aby přijímal data takto přijímaná zařízením Bluetooth s rozhraním. Jeden modul Bluetooth je řádně propojen s mikrokontrolérem pro obousměrný tok dat, zatímco program je prováděn pro vývoj pulzů PWM.
Aplikace pro Android z libovolného chytrého telefonu komunikuje prostřednictvím vestavěné technologie Bluetooth v telefonu s modulem Bluetooth, který je připojen k mikrokontroléru pro požadované operace. Pracovní cyklus modulace šířky pulzu je uveden níže.

Pracovní cyklus PWM
Horní dotykové tlačítko na chytrém telefonu, na kterém je spuštěn program Android, se používá ke zvýšení doby zapnutí PWM, zatímco dolní tlačítko ke snížení pracovního cyklu.

Aplikace pro Android pro řízení otáček stejnosměrného motoru
The Stejnosměrný motor prochází integrovaným obvodem ovladače motoru L293D s proměnlivým pracovním cyklem, který umožňuje napájení kolíku 1 L293D z mikroprocesoru pro řízení rychlosti. Datové kolíky LCD připojené k mikrokontroléru zobrazují procento rychlosti, při které motor běží.
Regulace otáček stejnosměrného motoru pomocí aplikace pro Android je tedy nákladově efektivní, praktický a nejbezpečnější způsob úspory energie. K řízení rychlosti motoru lze použít jednoduchou techniku PWM (Pulse Width Modulation). Pracovní cyklus vlny řídí jeho rychlost. Výměnou výstupních portů efektivně změní směr motoru.
V případě jakýchkoli dotazů týkajících se tohoto článku prosím uveďte vaše cenné návrhy komentářem v sekci komentářů níže. Zde je otázka, jaké jsou aplikace rozhraní stejnosměrného motoru k mikrokontroléru?