Roboty lze použít v mnoha aplikacích v průmyslových, vojenských a domácích aplikacích. Jedno z hlavních použití robotů je výhodou pro lidské bytosti. Ať už se jedná o jakýkoli druh nebezpečných situací, jako je vypuknutí požáru nebo místo plné nášlapných min, Roboti mohou z těchto problémů snadno vyřešit cestu. Podívejme se tedy na tyto dva typy robotů - pozemní důl snímající robota a hasicí robot
Robot pro snímání pozemních dolů
Jak vnímat nášlapné miny pomocí robotů?
Jednou z nejdůležitějších aplikací robotiky je obrana. Vojenský robot je dálkově ovládané vozidlo s mnoha jedinečnými vlastnostmi. Může to být robotické vozidlo s kamerou ke sledování, robotické vozidlo s LASEROVOU zbraní k detekci a zničení cílů, nebo robot s detektor kovů detekovat přítomnost nášlapných min.
Jedním z tradičních a konvenčních způsobů detekce min je použití vyškolených osob, které ručně hledají kovy nebo miny pomocí detektoru kovů. To je však nebezpečné a drahé a také pomalé.
K překonání tohoto problému je preferován mnohem pokročilejší systém.
Několik způsobů, jak detekovat miny:
- Pomocí robota, který může vložit do země sondu, která dokáže detekovat objekty pod půdou a určit typ materiálu.
- Používání robota s detektorem kovů, který dokáže detekovat přítomnost vodivých prvků, jako jsou miny, a varovat uživatele.
Než se podíváme podrobněji na druhý typ - tj. Robota s detektorem kovů, připomeňme si krátce dva důležité pojmy - miny a detektory kovů.
NA Nášlapná mina je výbušné zařízení záměrně umístěné pod zemí, které exploduje při spuštění tlakem. Podle statistické zprávy je v 70 zemích po celém světě asi 100 milionů nášlapných min. Jakmile je nášlapná mina umístěna, může fungovat až 50 let. Není to nebezpečné !!

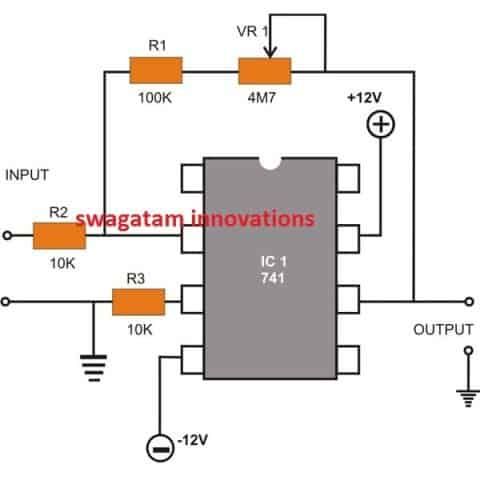
Základní detektor kovů funguje na principu Faradayova indukčního zákona. Skládá se z cívky, která je pod napětím, aby kolem ní vyvinula pulzující magnetické pole. Když se cívka dostane do blízkosti vodivého prvku, jako je kov (důl), indukuje se v něm elektrický proud (vířivý proud). Indukovaný vířivý proud způsobuje vývoj elektromagnetického pole kolem kovu, které se znovu přenáší na cívku, která vyvíjí elektrický signál, který je analyzován. Větší je vzdálenost mezi cívkou a kovem, slabší je magnetické pole.
Jednoduchý prototyp:

Jednoduchý prototyp robotického vozidla s detektorem kovů
Navrhování robota:
Robotické vozidlo se skládá z následujících jednotek:
- Obdélníková základna pro podporu celé struktury robota, připevněná dvěma kolečky pro pohyb.
- Několik stejnosměrných motorů zajišťujících požadovaný pohyb robota.
- Řídicí jednotka skládající se z RF přijímače, který přijímá povelové signály z vysílací jednotky pro řízení ovladače motoru a odpovídající řízení motorů.
- Jakmile je detekován kov, spustí se obvod detektoru kovů spolu s bzučákem.
Jak robot pracuje:
Obvod detektoru kovů zabudovaný do řídicích obvodů robota se skládá z tranzistoru, který je poháněn vyladěným obvodem oscilátoru sestávajícím z cívky. Když je detekován kov a elektrický proud je znovu přenášen přes cívku, je tranzistor 1 v zapnutém stavu a pohání další tranzistor 2 do vypnutého stavu. Tento tranzistor3 zase přivádí další tranzistor do vypnutého stavu. Tento konkrétní tranzistor 3 je připojen k jinému tranzistoru 4, který je připojen tak, že je v zapnutém stavu, když je jeho budicí tranzistor 3 ve vypnutém stavu. Tranzistor 4 je připojen tak, že za podmínek je bzučák a LED dána správným předpětím a začnou vodit.

Blokové schéma jednotky detektoru kovů
LED začne svítit a bzučák začne zvonit. Když je tedy detekován kov, začne bzučák vyzvánět a LED bude svítit.
Ovládání robota:
Jednoduchý prototyp lze ovládat pomocí RF komunikace, což je komunikační systém krátkého dosahu. Příkazy jsou přenášeny pomocí vysílače a přijímány přijímačem zabudovaným do obvodu robota pro ovládání pohybu robota.

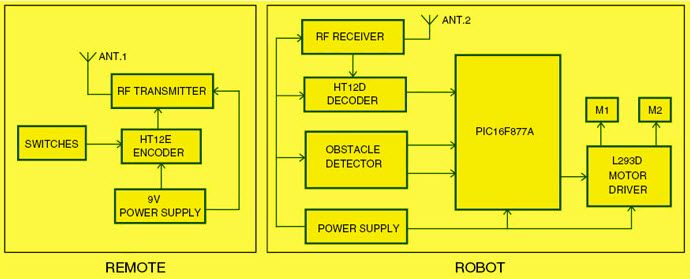
Blokové schéma sekce vysílače
Vysílač se skládá ze sady tlačítek, jako jsou dopředu, dozadu, stop, vlevo a vpravo, které jsou stisknuty, aby zajistily pohyb robota v libovolném požadovaném směru. Tlačítka jsou připojena ke vstupnímu portu mikrokontroléru. Mikrokontrolér při příjmu těchto signálů vyvíjí odpovídající 4bitový signál v paralelní formě přes další I / O port, ke kterému je připojen IC kodéru. Kodér převádí tyto signály na sériovou formu dat. RF vysílač moduluje tato sériová data, která jsou přenášena přes anténu.

Blokové schéma sekce přijímače
Sekce přijímače namontovaná na robotu se skládá z RF přijímače, který demoduluje tento signál. Dekodér IC přijímá tento signál v sériové podobě a na svém výstupu vyvíjí odpovídající 4 bitová paralelní data. Mikrokontrolér přijímá tato data a podle toho poskytuje řídicí signál ovladači motoru IC LM293D, který pohání oba motory.
Hasičské robotické vozidlo:
Koncept hasicí robotické vozidlo bojuje v ohni. V posledních letech došlo k několika vážným nehodám, včetně výbuchů ohně a bomb. Věděli jsme o velkých požárních nehodách, jako jsou jaderné elektrárny, ropa, plynové nádrže a chemické továrny, velké požární průmyslové společnosti v těchto místech, jakmile požár zapálí, mohou být velmi vážné. Při této incidenci zemřely tisíce lidí. To je hašení požáru robotické vozidlo technologie. Toto robotické vozidlo používalo k hledání ohně a boji o ohně.

Hasičské robotické vozidlo
Pracovní princip požárního robotického vozidla:
Robotické vozidlo naloženo tankerem na vodu. Čerpadlo je řízeno bezdrátovou komunikací (RF a mobilní komunikace). Konec vysílače připojený k tlačítkům. Pomocí tohoto tlačítka jsou příkazy odesílány do přijímače a řídicí moment robota jako vpřed, vzad, vlevo, vpravo. Přijímací konec tři motory jsou připojeny k mikrokontroléru.

Blokové schéma vysílače

Blokové schéma přijímače
RF vysílač funguje jako RF dálkové ovládání, kde je dosah 200 metrů. V domácnostech, kancelářích a průmyslových odvětvích se požární senzory uchovávají na určitých místech, když v blízkosti požárního senzoru dojde k požáru. Senzory znamenají, že se odpovídající bit vysílá do RF přijímače. RF přijímač je integrován do mikrokontroléru. Když RF přijímač přijímá signály, které předávají informace do mikrokontroléru, robot se pohybuje směrem k požárním senzorům. Místa senzorů jsou uložena v mikrokontroléru. Jakmile robot dosáhne požadovaného místa, zastaví se a aktivuje postřikovač na daný oheň. Po vystřelení přejde robot do výchozí polohy. Celý obvod je řízen mikrokontrolérem.
Typy hasičských robotických vozidel:
Domácí hasicí robotické vozidlo :
Polní akce je omezena na aktuální Flore of house. Tento robot používá mnoho předmětů pro domácnost k vznícení, když někdo spí nebo je pryč. Tento robot se používá k zabezpečení domácnosti a pomocí této aplikace se ve Flore otevírají všechny dveře, protože toto vozidlo se pohybuje z jednoho místa na jiné místo v domácnosti. Hasicí prostor musí být bezpečný, aby nezpůsobil novou nehodu. Další funkcí tohoto robota je provoz na velkou vzdálenost.
Průmyslové hašení:
Většina průmyslových odvětví čelí problémům s požárními nehodami, jako je plyn, benzín, jaderné elektrárny, chemický průmysl, obrovské škody a v okolí okolních oblastí je více mrtvých lidí. Tento robot má sílu přenášet oheň uvnitř hořící oblasti a dodávat neomezené množství vody. Oheň způsobuje sníženou viditelnost, extrémní teplo a mnoho dalších situací, které mohou vést ke zranění.
Boj s lesními požáry:
Lesní požáry jsou velmi nebezpečné. Může to být krátká doba, kdy spálíte velké množství lesních ploch. I městské hasičské sbory musí řešit lesní požáry v okolí města. Před několika lety bylo v 90. letech zabito asi 152 hasičů. Lesní požární robotika používá k hašení požáru a hašení požáru. Tento robot používá pro účely bezdrátové komunikace externí řídicí zařízení. Modul je spojen s výstupním koncem, který slouží k hašení lesního požáru robota. K ovládání lesního požárního robota se používají aplikace jako tlakový senzor, teplotní senzor, smogový senzor, infračervený senzor.
Na výzvu!
I když jsem dal základní představu o robotu s detektorem kovů, stále existuje hlavní otázka - Jak vést robota na nerovných terénech, které nejsou známy, zejména v prostředích vystavených silným dešťům, prachu a vysokému teplotnímu rozsahu. Chcete-li najít odpověď a zveřejnit své komentáře.