V této době průmyslová automatizace Roboti se používají k manipulaci s různými procesy pro přesnou a lepší kvalitu výroby. Výběr ideálního motoru pro dokonalého robota je vždy náročným úkolem při navrhování robota zejména pro průmyslová odvětví. Správný výběr elektrické motory v průmyslových robotech vyžaduje několik parametrů, které berou v úvahu ovládání paže, polohu, úhlové a lineární pohyby.

Motory používané v průmyslové robotice
Výběr motorů je nejméně chápaný koncept pro fanoušky robotiky, kteří vyžadují strategizaci a seriózní analýzu. Zahrnuje stanovení rychlosti robota, zrychlení, požadavků na točivý moment na základě hmotnosti robota, velikosti kola a aplikace, kde má být implementován. Existuje mnoho typů motorů jsou k dispozici na dnešním trhu, ale většinou jsou to malé pagerové motory, servomotory , lineární motory, krokové motory a stejnosměrné převodové motory se používají v průmyslových robotech podle oblasti jejich použití.
Nesprávný výběr motoru skončí u handicapovaného robota, takže jaký typ motoru je nejlepší a vhodný pro to, aby byly průmyslové roboty skutečné, přesné a dostatečné pro splnění všech potřeb průmyslových procesů při zachování všech realistických specifikací?
Zde jsme shromáždili několik poznatků o těchto motorech od průmyslových odborníků pro výběr odpovídajícího motoru, který bude vybrán pro průmyslové aplikace.
Doporučujeme vám řídit se názory odborníků, jejichž cílem je poskytnout nejlepším motorům pro průmyslovou robotiku dostupné DC, krokové, střídavé a servomotory pro přesné, nákladově efektivní a spolehlivé pohyby robota.
Ch .ampath Kumar
M.tech ve VLSI designu
Writer technického obsahu
 Stejnosměrné motory jsou k dispozici v širokém rozsahu pro nepřetržitý provoz, ale vyžaduje redukci převodovky tak, aby vyhovovala příslušnému použití. Krokový motor nevyžaduje žádnou redukci převodových stupňů, protože jeho stupňovitý provoz zajišťuje nízkou rychlost pro specifické aplikace. Nakonec se servomotory používají k přesnému a přesnému řízení, které je implementováno v operacích uzavřené smyčky. Vyžaduje však další zpětnou vazbu a hnací obvody, takže je dražší než stejnosměrný a krokový motor. Díky servomotorům je robot díky svému přesnému pohybu spolehlivější.
Stejnosměrné motory jsou k dispozici v širokém rozsahu pro nepřetržitý provoz, ale vyžaduje redukci převodovky tak, aby vyhovovala příslušnému použití. Krokový motor nevyžaduje žádnou redukci převodových stupňů, protože jeho stupňovitý provoz zajišťuje nízkou rychlost pro specifické aplikace. Nakonec se servomotory používají k přesnému a přesnému řízení, které je implementováno v operacích uzavřené smyčky. Vyžaduje však další zpětnou vazbu a hnací obvody, takže je dražší než stejnosměrný a krokový motor. Díky servomotorům je robot díky svému přesnému pohybu spolehlivější.
Viswanath Prathap
M. Tech v elektroenergetice
Writer technického obsahu

Pick and place Roboti se obvykle nacházejí v průmyslových odvětvích, aby vybrali předmět z jedné pozice nebo místa a umístili jej na jinou pozici nebo místo. Za tímto účelem je třeba ovládat úhlové pohyby kloubů robotů, kterých lze dosáhnout pomocí servomotorů. Tyto servomotory jsou řízeny pomocí PWM dat poskytovaných robotickým ovladačem pro ovládání kloubů robotů. Servomotory jsou schopné generovat dostatečný točivý moment pro rychlý pohyb objektu ze zastavené polohy. Ty se tedy používají jako kola ve vojenských a průmyslových robotických vozidlech. Pro řízení polohy lze také použít krokové motory, které však spotřebovávají energii i v klidovém období pouze pro zablokování a udržení polohy nařízené. Servomotory se tedy v průmyslové robotice obvykle používají jako vysoce výkonná náhrada za krokové motory.
Naresh Reddy
M.tech ve vestavěném systému
Průvodce projektem
Struktura mechanického robota musí být řízena dokonale  rm úkol. Existují tři různé fáze pro ovládání robota, jako je vnímání, zpracování a akce. Senzory poskytují informace o poloze jeho kloubů a koncovém efektoru robotovi, poté jsou tyto informace zpracovány do řídicí jednotky a vypočítají příslušný signál motoru, který se pohybuje mechanicky. Velká většina robotů používá elektromotory. V přenosných robotech se opakovaně používají střídavé a kartáčované stejnosměrné motory a v průmyslových robotech se používají střídavé motory. Tyto motory jsou preferovány v systémech s menší zátěží a tam, kde převládající forma pohybu je rotační.
rm úkol. Existují tři různé fáze pro ovládání robota, jako je vnímání, zpracování a akce. Senzory poskytují informace o poloze jeho kloubů a koncovém efektoru robotovi, poté jsou tyto informace zpracovány do řídicí jednotky a vypočítají příslušný signál motoru, který se pohybuje mechanicky. Velká většina robotů používá elektromotory. V přenosných robotech se opakovaně používají střídavé a kartáčované stejnosměrné motory a v průmyslových robotech se používají střídavé motory. Tyto motory jsou preferovány v systémech s menší zátěží a tam, kde převládající forma pohybu je rotační.
Suresh Megaji
M. Tech v bezdrátových komunikačních systémech
Writer technického obsahu

Pokud se chcete zapojit do „robotiky“ a její aplikace v „průmyslu“, měli byste vědět o „motorech“, které se používají v robotice, protože robotika je závislá hlavně na motorech. „Robotické stroje“ se v zásadě používají pro různé aplikace ve výrobě. Různé „motory“, jako jsou DC, pulzní, krokové, optické pohony, motory s částečným otáčením a s Hallovým efektem atd.… Se používají s některými technikami k jejich použití v průmyslu a k jejich přátelství, jako
- Stejnosměrné motory se používají pro aplikace orientované na baterie, pomalejší rychlost, mobilní aplikace.
- Kdekoli potřebujeme rotačně orientovanou aplikaci, můžeme použít krokové motory jako unipolární a bipolární motory.
- Pro pohyby hlavy a paží můžeme použít motory s částečným otáčením.
- Pokud chceme použít magnetické pole, můžeme použít motory s Hallovým efektem a optické pohony atd.
Použitím robotiky využívající inteligentní motory můžeme ušetřit peníze, čas, prostor, nebezpečné pohyby atd.
Ajay Sahare
Marketingový manažer

Průmyslové roboty se používají v prostředí průmyslové výroby. Jedná se o ramena speciálně vyvinutá pro takové aplikace, jako je svařování, manipulace s materiálem, lakování a další.
Ne každé mechatronické zařízení používané v průmyslovém prostředí lze považovat za robota. Jak je definováno ISO (International Standards Organization), za průmyslového robota se považuje automaticky ovládaný, přeprogramovatelný, víceúčelový manipulátor programovatelný ve třech nebo více osách.
Motory používané v průmyslové robotice jsou
- Motory se střídavým proudem (AC)
- Stejnosměrné (DC) motory
- Servomotory
- Krokové motory.
1. Třífázové motory lze dále rozdělit na asynchronní a synchronní typy. Například indukční střídavý motor je jednotka asynchronního typu, která je v podstatě složena ze statoru s vinutým drátem a rotoru. Napájení je připojeno k vodiči a střídavý proud, který protéká, indukuje elektromagnetické pole (EM) ve vinutém drátu a dostatečně silné pole poskytuje sílu pro pohyb rotoru. Synchronní motory jsou motory s konstantními otáčkami, které pracují synchronně s kmitočtem střídavého vedení a běžně se používají tam, kde jsou požadovány přesné konstantní otáčky.
2. Mnoho průmyslových aplikací, včetně robotiky, využívá stejnosměrné motory často kvůli snadné regulaci rychlosti a směru. Jsou schopné nekonečného rozsahu rychlostí, od plné rychlosti až po nulu, se širokým rozsahem zatížení.
Protože stejnosměrné motory mají vysoký poměr točivého momentu k setrvačnosti, mohou rychle reagovat na změny řídicích signálů. Stejnosměrný motor lze plynule regulovat na nulový pohyb a okamžitě zrychlovat v opačném směru, aniž by bylo nutné složité obvody přepínání výkonu. Bezkartáčové stejnosměrné motory s permanentním magnetem jsou obvykle dražší než typy kartáčů, i když mohou poskytnout výhody ve spotřebě energie a spolehlivosti.
Bez komutátoru mohou střídavé motory pracovat efektivněji a při vyšších rychlostech než běžné stejnosměrné motory. Většina střídavých stejnosměrných motorů běží na lichoběžníkovém střídavém průběhu, ale některé motory pracují se sinusovými vlnami. Bezkartáčové motory poháněné sinusovými vlnami mohou dosáhnout plynulého provozu při nižších rychlostech s nízkým zvlněním točivého momentu, což je činí ideálními pro broušení, povlakování a další aplikace, jako je povrchová úprava.
V případě kartáčovaných stejnosměrných motorů, pokud chcete, aby se váš motor točil pomaleji bez ztráty energie, můžete použít pulzní šířkovou modulaci (PWM). To v zásadě znamená velmi rychlé zapnutí a vypnutí motoru. Tímto způsobem se motor otáčí s nižší rychlostí, jako by bylo aplikováno nižší napětí, aniž by se staral o výkon.
Točivý moment generovaný kartáčovaným stejnosměrným motorem je v zásadě příliš malý a rychlost příliš velká na to, aby byla užitečná. Redukce převodů se tedy obvykle používá ke snížení rychlosti a zvýšení točivého momentu.
3. Servomotory se používají v systémech uzavřené smyčky s digitálním ovladačem. Řídicí jednotka odesílá povely rychlosti do budicího zesilovače, který zase napájí servomotor. Nějaká forma zpětnovazebního zařízení, jako je resolver nebo kodér, poskytuje informace o poloze a rychlosti servomotoru. Resolver nebo kodér mohou být integrovány do motoru nebo umístěny na dálku. Díky systému uzavřené smyčky může servomotor pracovat se specifickým profilem pohybu, který je naprogramován do řídicí jednotky.
4. Krokové motory mohou pracovat se zpětnou vazbou nebo bez ní, přičemž rotace motoru je rozdělena na malé úhlové kroky. Je řízen pulzními povelovými signály a může se zastavit přesně v poveleném bodě bez nutnosti použití brzd nebo spojkových sestav. Po odpojení napájení zůstává krokový motor s permanentním magnetem obvykle ve své poslední poloze. Více synchronních krokových motorů lze udržovat synchronně tím, že je pohání ze společného zdroje.
Dev desai
Marketingový manažer 
Pokud se plánujete zapojit do robotiky, budete se muset seznámit s mnoha dostupnými typy motorů. Celý robotický pohyb je tak či onak motorizovaný, takže je důležité vědět, jaké máte možnosti.
Stejnosměrné motory
Kromě provozu na baterie je směr pohybu stejnosměrného motoru určen polaritou vstupního výkonu. To je pro robotické funkce absolutní nutnost. Naštěstí tento typ motoru přichází v široké škále velikostí, požadavků na napětí a je k dispozici všude.
Níže jsou uvedeny různé typy motorů
- Základní motor mobility
- Vysokorychlostní hobby motor
- Řemenový motor
- Slot auto motor
- Pulzní ovládání
- Motor přizpůsobený paži
- Bipolární stepper s ukazatelem
Bio Motor
Biokov je úžasná látka, která existuje již několik let a má řadu aplikací v oblasti robotiky. Na obrázku vidíme, že kousek drátu z biometalu se zmenší o pět procent své délky, když je na něj aplikováno jen několik voltů. Po letech testování se biologický drát ukázal být silným, spolehlivým a stává se užitečnějším, když se objevují nové produkty. Jeho poněkud pomalejší doba odezvy je ideální pro robotické aplikace rukou a rukou, kde by trhání bylo problematické. Dlouhý kus drátu může způsobit výrazný pohyb, když se natáhne po celé délce robotické paže. Na komerčním trhu v současné době existují sady robotických ramen, které používají biokov.
Relé
Relé se v robotice téměř vždy používá k izolaci výkonu určeného pro motory od zdroje napájení pro funkci počítače. Motory kvůli své nízké impedanci kladou vysoké nároky na napájecí zdroje a vytvářejí několik závad, které počítače nemohou tolerovat. Proto je dobré použít samostatný zdroj vysokého proudu pouze pro motory.
Solenoidy
Solenoidy se nejlépe používají jako ovládací zařízení manipulátorů nebo spínací operátory. Jejich pohyb je rychlý a silný, takže v uchopovačích se téměř vždy používá pružina ke zmírnění akce. Jak vidíte na obrázku, k uzavření chapače se používají ovládací vodiče. Tyto ovládací vodiče mohou fungovat také jako vratné pružiny. Chápače, jako je tento, se nacházejí spíše v práci na výrobní lince, kde je úkol velmi měřený a pokrývá úzké parametry.
Sekundární funkce
Většina motorických funkcí zahrnuje pohyblivost, paži, hlavu nebo nějaký jiný viditelný vnější pohyb, některé pohybové pohyby však nejsou tak viditelné. Velké průmyslové roboty používají hydraulické systémy, které k výrobě pracovního tlaku hydraulické kapaliny používají motory čerpadel. Další důležitou sekundární funkcí motorů je řízené seřízení. Pro zvýšení přesnosti jsou potenciometry, které jsou propojeny s motory, obvykle víceotáčkovými zařízeními.
Závěr
Roboty mohou být velmi složitá zařízení vyžadující širokou škálu pohybů poháněných motorem. Tento článek má poskytnout přehled o rozsahu zařízení, se kterými se jako stavitel robotů můžete setkat. Bylo by dobré začít průzkumem dodavatelů robotického vybavení a dostupného spotřebního materiálu. Nyní je k dispozici obrovské množství produktů a internet usnadňuje vyhledávání, získávání informací a používání. Ať už jsou vaše potřeby jakékoli, trocha vynalézavosti a odhodlání, které všichni stavitelé robotů zřejmě mají, by vám mělo dobře posloužit.
Samadan Wandre
Marketingový manažer
„Motory používané v robotice“
- Základní motor mobility

- Vysokorychlostní hobby motor
- Řemenový motor
- Slot auto motor
- Pulzní ovládání
- Motor přizpůsobený paži
- Bipolární stepper s ukazatelem

Větší motory jsou nejvhodnější pro základny mobility, které umožňují robotům manévrovat s terénem. Některé z těchto motorů jsou vybaveny převodovkami, které produkují nižší rychlost a točivý moment potřebný pro mobilitu. Snížení napětí motoru může také zpomalit na požadovanou rychlost. Pouze experimenty mohou určit, zda bude váš motor pracovat s nižším napětím. Pokud ano, ušetřili jste si spoustu problémů, pokud ne, existují i jiné způsoby, jak zpomalit motory. Některé vysokorychlostní motory lze použít, pokud jsou použity šnekové nebo šroubové převody.
Příklad šroubového převodu lze vidět na ilustraci robotického ramene. Když se motor otáčí ve směru hodinových ručiček, sestava šroubu je přitahována k motoru a rameno se smršťuje a když se otáčí proti směru hodinových ručiček, rameno se vysune. I když se hřídel motoru otáčí rychle, je působení ramene z důvodu redukce šroubu podstatně pomalejší. Na tomto následujícím obrázku obvodu motoru vidíme stejnosměrný motor ovládaný výkonovým tranzistorem. Přepínač relé (Double Pole Double Throw) určuje směr. Tranzistor Q1 by měl být výkonovým tranzistorem, který unese velké zatížení motoru.
Pulzní motory
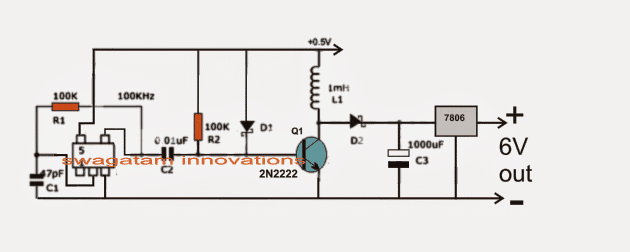
Některé motory odvozují snížení rychlosti provozem z pulzního stejnosměrného signálu. Tento signál je obvykle asi sto Hz. Rychlost motoru lze změnit změnou šířky pulzu, nikoli změnou frekvence pulzu. Motory, jako jsou tyto, najdete v obchodech s přebytečnou elektronikou a lze je snadno identifikovat pomocí pulzního generátoru, který je k němu připojen. Jakýkoli stejnosměrný motor může být poháněn zdrojem impulzů a je součástí schématu takového obvodu.
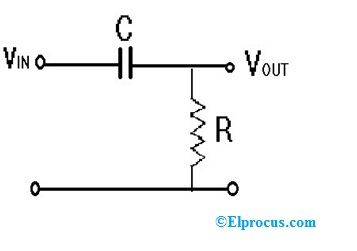
Jak vidíte, jako hnací oscilátor byl zvolen časovač 555, který produkuje frekvenci přibližně 100 Hz. Rezistor R1 a kondenzátor C stabilizují a izolují generátor impulzů od hrotů vytvářených motorem. Vzhledem k tomu, že toto zařízení může čerpat ze zdroje 6 až 12 voltů, možná budete chtít změnit hodnotu kondenzátoru C4 a C6, abyste dosáhli lepších výsledků, v závislosti na tom, jaké napětí používáte. Pulzní výstup je převzat z kolíku tři IC1 a přiváděn na kolík dva IC2, také časovač 555.
Druhý časovač mění šířku pulzu nastavením napětí, které je přiváděno na kondenzátor C6 potenciometrem R5 a odporem R6. Doba trvání pulzu určuje to, co určuje rychlost motoru, a šířku pulzu lze upravit od 10% do 100%.
Tranzistor Q1 přijímá signál modulovaný šířkou pulzu přes rezistor R7. Jelikož Q1 je slaboproudé zařízení, předává signál do Q2, výkonového tranzistoru, který zvládne aktuální požadavky motoru. Tyto tranzistory nejsou kritické a bude fungovat téměř jakýkoli typ nízkonapěťového výkonového tranzistoru. Relé určí, jakým směrem se bude motor ubírat.
Krokové motory
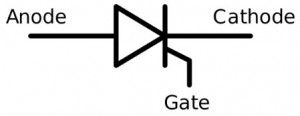
Nejsložitější ze všech motorů je krokový motor. Stejně jako název odvozuje, motor se otáčí v přírůstcích a pracuje pulzně. Přesný stupeň otočení na krok se může u jednotlivých výrobců nebo modelů lišit, ale 20 stupňů je populární a při jednom úplném otočení vyprodukuje 18 kroků. Existují dva základní typy krokových motorů, bipolární a unipolární. Jak vidíte na schématu krokového motoru, bipolární je jednoduše motor se dvěma cívkami.
Unipolární typ jsou dvě cívky se středovými kohoutky. Pokud jsou středové kohoutky ignorovány, unipolární motor může fungovat jako bipolární typ. Dvě cívky v krokovém motoru jsou napájeny krokovými impulsy střídavě v polaritě od cívky k cívce. Mapa tohoto procesu je uvedena v pracovním diagramu, aby graficky znázorňovala akci motoru. Na rozdíl od běžných stejnosměrných motorů točivý moment klesá s rychlostí. Pro posunutí krokového motoru je také vyžadován speciální typ pohonné jednotky, který by měl být dodáván s motorem. Nedoporučuje se stavět řídicí jednotku, pokud motor není dodáván s dobrým specifikačním listem, který obsahuje doporučení komponentů a úplné schéma.
Motor může vyžadovat vyrovnávací paměť, aby byl izolován od systému pohonu, nebo může vyžadovat samostatný napájecí zdroj. Bez ohledu na potřeby se mohou u jednotlivých motorů značně lišit. Hobby obchody jsou nejspolehlivějšími dodavateli krokových motorů, a přestože je mohou občas mít přebytečné elektronické obchody, nemusí obsahovat potřebné technické údaje
Částečné otáčky motorů
Některé robotické funkce vyžadují pouze částečné otočení, například pohyby hlavy nebo paží. Nejjednodušší způsob, jak toho dosáhnout, je polohové zarážky a prokluz. Ilustrace mechanických detailů tohoto typu motoru je uvedena výše. Mikrospínače lze použít jako snímače zastavení k vypnutí napájení a resetování směru pro další akci.
Spodní kolo je spojeno s motorem, zatímco horní kolo je odděleno od spodního kola kruhovým kusem plsti. Když se spodní kolo otáčí, horní kolo se otáčí s ním, dokud se dorazový kolík nedotkne mikrospínače. Některé konstrukce neumožňují zastavení motoru, takže jako dorazy motoru budou fungovat jednoduché šrouby s rozpěrkami.
Bio-motor
Biokov je úžasná látka, která existuje již několik let a má řadu aplikací v oblasti robotiky. Na obrázku vidíme, že kousek drátu z biometalu se zmenší o pět procent své délky, když je na něj aplikováno jen několik voltů. Po letech testování se biologický drát ukázal být silným, spolehlivým a stává se užitečnějším, když se objevují nové produkty. Jeho poněkud pomalejší doba odezvy je ideální pro robotické aplikace rukou a rukou, kde by trhání bylo problematické. Dlouhý kus drátu může způsobit výrazný pohyb, když se natáhne po celé délce robotické paže. Na komerčním trhu v současné době existují sady robotických ramen, které používají biokov.
Bhaskar Singh
Marketingový manažer
 Průmyslové roboty jsou zařízení, která do jisté míry duplikují lidský pohyb spolu se snižováním nebezpečí a poskytují větší sílu, přesnost a kontinuitu. Potřebují širokou škálu pohybů poháněných motorem v závislosti na jejich provozních režimech, ovládání, použitých nástrojích a prováděné práci. Průmyslový robotický motor by měl mít potenciál zvládnout širokou škálu úkolů než běžné motory, aby se mohl specializovat na konkrétní úkol.
Průmyslové roboty jsou zařízení, která do jisté míry duplikují lidský pohyb spolu se snižováním nebezpečí a poskytují větší sílu, přesnost a kontinuitu. Potřebují širokou škálu pohybů poháněných motorem v závislosti na jejich provozních režimech, ovládání, použitých nástrojích a prováděné práci. Průmyslový robotický motor by měl mít potenciál zvládnout širokou škálu úkolů než běžné motory, aby se mohl specializovat na konkrétní úkol.
Elektromotory se v průmyslové robotice nejčastěji používají díky vysoce účinnému získávání energie a relativně jednoduchému konstrukci, což z nich dělá oblíbenější alternativu, pokud jde o hodnocení nákladů na výkon ve všech aspektech - instalace, údržba a servis.
V závislosti na potřebné práci se používají různé motory pro různé účely. Například stejnosměrné motory se používají pro pohyby ve směru hodinových ručiček a proti směru hodinových ručiček, příklady jsou v jeřábech a kladkostrojích, pulzní motory se používají k poskytování pulzních pohybů pomocí šířky stejnosměrného pulzu, motory s částečným otáčením se používají k zajištění pohybů hlavy a paží a nejsložitější - krokové motory se používají k zajištění stupňovitých otáček v krocích po stupních.
Kromě toho se v závislosti na typu práce používají pro různé účely motory s různými jmenovitými hodnotami a velikostmi. Existuje několik typů motorů, z nichž každý má různé aplikace na různých místech v závislosti na práci a konstrukci robota.
Mohan Krišna. L
Vedoucí prodeje a podpory
Roboti jsou zvyklí dělat práci, kterou by mohli dělat lidé, a existuje mnoho důvodů, proč jsou roboti lepší než lidé. 
Existují dva hlavní typy robotů: -
Mobilní robot: Ten pohyb po nohou nebo stopách.
Stacionární robot: To má pevnou základnu.
Stacionární roboti Robot Arms lze obvykle použít k vyzvednutí předmětů nebo k jiné práci, která zahrnuje dosažení cíle.
Robotické rameno má tři základní části: -
- Ramenní kloub
- Kloub zápěstí
- Pevná základna
Potřebujete robot pro
- Schopnost rychle pracovat a nebezpečné prostředí.
- Schopnost opakovat úkoly znovu a znovu.
- Schopnost pracovat přesně.
- Schopnost dělat různé úkoly.
- Účinnost.
Motor je zařízení, které převádí elektrickou energii na mechanickou energii, tj. Elektromechanické zařízení. Existují dva typy motorů, jako je střídavý motor a stejnosměrný motor.
Motor používaný v průmyslové robotice je servomotor. Servomotor je jednoduchý elektrický motor ovládaný pomocí servomechanismu. Pokud je ovládaný motor ovládán střídavým proudem, nazývá se servomotor AC, jinak servomotor DC. Většina servomotorů se může otáčet o 90 až 180 stupňů. celých 360 stupňů nebo více. Některé aplikace servomotoru v robotice jsou
- Aplikace servomotoru v robotice, tj. Jednoduchý robot typu pick and place, slouží k vyzvednutí objektu z jedné pozice a umístění objektu do jiné polohy.
- Používají se servomotory v dopravníku
- v průmyslových výrobních a montážních jednotkách k předání předmětu z jedné montážní stanice do druhé. Například: - Proces plnění lahví.
- Servomotor v robotickém vozidle zde Servomotor použitý v kolech. Protože se používá servomotor s kontinuální rotací.
Dinesh.P
Marketingový manažer
 Byly představeny roboty, které snižují lidskou tvrdou práci a pomáhají lidem vytvářet štěstí pro budoucí vývoj. Pojem roboti znamená stroj, který napodobuje různé lidské vlastnosti. Robotika zahrnuje znalosti strojírenství, elektroniky, elektrotechniky a informatiky. Motory používané v robotech jsou stejnosměrné motory, krokové motory a servomotory
Byly představeny roboty, které snižují lidskou tvrdou práci a pomáhají lidem vytvářet štěstí pro budoucí vývoj. Pojem roboti znamená stroj, který napodobuje různé lidské vlastnosti. Robotika zahrnuje znalosti strojírenství, elektroniky, elektrotechniky a informatiky. Motory používané v robotech jsou stejnosměrné motory, krokové motory a servomotory
Kde,
- Stejnosměrné motory se používají pro nepřetržité otáčení
- Krokové motory se používají k otáčení o několik stupňů
- Servomotory se používají k určování polohy, lze je použít v automobilech a letadlech
Ganesh .J
Marketingový manažer 
Roboti se používají k práci, kterou by mohli dělat lidé, a také snižují lidské úsilí a čas a zlepšují kvalitu. Motory používané v průmyslové robotice jsou
- Motory se střídavým proudem (AC)
- Stejnosměrné (DC) motory
- Servomotory
- Krokové motory.




![Třpytivý LED květový obvod [Vícebarevný LED světelný efekt]](https://electronics.jf-parede.pt/img/3-phase-power/3B/glittering-led-flower-circuit-multicolored-led-light-effect-1.jpg)