Robot pro výběr a umístění je robot, který se používá k vyzvednutí objektu a jeho umístění na požadované místo. Může to být válcový robot poskytující pohyb v horizontální, vertikální a rotační ose, sférický robot poskytující dva rotační a jeden lineární pohyb, kloubový robot nebo robot scara (pevné roboty se 3 vertikálními osami rotačních ramen).
Výhody
Než se přesuneme dále, podívejme se na několik důvodů, proč jsou preferováni roboti typu pick and place:
- Jsou rychlejší a ve srovnání se svými lidskými protějšky zvládnou práci za pár sekund.
- Jsou flexibilní a mají odpovídající design.
- Jsou přesné.
- Zvyšují bezpečnost pracovního prostředí a nikdy se neunaví.
Součásti robota Pick N Place

Vyberte si N Place Robot
Podívejme se, z čeho se robot pro výběr a umístění vlastně skládá:
- Roverovi : Je to hlavní tělo robota, které se skládá z několika tuhých těles, jako je válec nebo koule, klouby a články. Je také známý jako manipulátor.
- Koncový efektor : Jedná se o tělo připojené k poslednímu kloubu roveru, které slouží k uchopení nebo manipulaci s předměty. Může to být analogie k paži lidské bytosti.
- Pohony : Jsou řidiči robota. Ve skutečnosti ovládá robota. Může to být jakýkoli motor, jako je servomotor, krokový motor nebo pneumatické nebo hydraulické válce.
- Senzory: Používají se ke snímání vnitřního i vnějšího stavu, aby bylo zajištěno, že robot funguje hladce jako celek. Senzory zahrnují dotykové senzory, IR senzor atd.
- Ovladač : Používá se k ovládání akčních členů na základě zpětné vazby senzoru a tím k řízení pohybu každého kloubu a případně pohybu koncového efektoru.
Práce se základním robotem Pick N Place:
Základní funkce a vybrat a umístit robota se provádí jeho klouby. Klouby jsou analogické s lidskými klouby a používají se ke spojení dvou po sobě jdoucích tuhých těles v robotu. Mohou to být otočné nebo lineární spoje. Chcete-li přidat kloub k jakémukoli odkazu robota, musíme vědět o stupních volnosti a stupních pohybu pro danou část těla. Stupně volnosti implementují lineární a rotační pohyb těla a stupně pohybu znamenají počet os, kterými se tělo může pohybovat.

Jednoduchý robot Pick N Place
Jednoduchý robot typu pick and place se skládá ze dvou tuhých těles na pohyblivé základně, spojených dohromady s rotačním kloubem. Rotační kloub je ten, který poskytuje rotaci o 360 stupňů kolem kterékoli z os.
- Dno nebo základna jsou připevněny kolečky, která zajišťují lineární pohyb.
- 1Svatýtuhé tělo je upevněno a podporuje druhé tuhé tělo, kterému je poskytován koncový efektor.
- 2ndtuhé tělo je vybaveno pohybem ve všech 3 osách a má 3 stupně volnosti. Je připojen k 1Svatýtělo s rotačním kloubem.
- Koncový efektor by měl pojmout všech 6 stupňů volnosti, aby se dostal na všechny strany komponenty, aby zaujal polohu do jakékoli výšky.
Celkově funguje základní robot pick and place takto:
- Kola pod základnou pomáhají přesunout robota na požadované místo.
- Tuhé tělo nesoucí koncový efektor se ohne nebo narovná a dosáhne polohy, kde je předmět umístěn.
- Koncový efektor silně uchopí předmět a umístí ho do požadované polohy.
Nyní, když máme krátkou představu o robotovi typu pick and place, základní otázkou je, jak je vlastně řízen.
Jednoduchý robot typu pick and place lze ovládat ovládáním pohybu jeho koncového efektoru. Pohyb může být pomocí hydraulického pohybu, tj. Pomocí hydraulické kapaliny pod tlakem k pohonu robota, nebo pomocí pneumatického pohybu, tj. Použití stlačeného vzduchu k vyvolání mechanického pohybu. Nejúčinnějším způsobem je však použití motorů k zajištění požadovaného pohybu. Motory musí být ovládány, aby poskytovaly požadovaný pohyb robotu a koncovému efektoru.
Pracovní příklad ovládání robota Pick N Place
Co takhle ovládat robota pomocí několika tlačítek na klávesnici? Ano, je to možné! Pouhým stisknutím požadovaného tlačítka můžeme vyslat robotovi povel, aby se pohyboval jakýmkoli směrem, aby splnil náš úkol. Toho lze navíc dosáhnout pomocí jednoduché bezdrátové komunikace.
Podívejme se, jak to vlastně funguje:
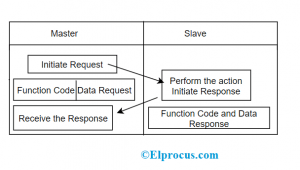
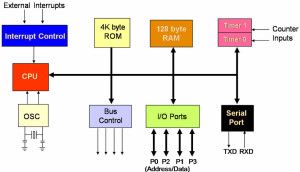
Část vysílače se skládá z klávesnice propojené s mikrokontrolérem. Jakékoli číslo tlačítka v desítkovém formátu je mikrokontrolérem převedeno na 4místné binární číslo a paralelní výstup na jednom z jeho portů je aplikován na kodér. Kodér převádí tato paralelní data na sériová data a ta se přivádí do vysílače vybaveného anténou pro přenos sériových dat.

Blokové schéma ukazující vysílač robota Pick N Place
Strana přijímače se skládá z dekodéru propojeného s mikrokontrolérem. Dekodér převede přijatý příkaz v sériovém formátu do paralelního tvaru a předá tato data mikrokontroléru. Na základě tohoto příkazu mikrokontrolér odesílá příslušné vstupní signály do ovladačů motorů k řízení příslušných motorů.

Blokové schéma ukazující přijímač robota Pick N Place
Systém se skládá ze dvou motorů zajišťujících pohyb celého robota a dvou dalších motorů zajišťujících pohyb paží. Je třeba ovládat koncový efektor nebo chapadlo, aby na předmět vyvíjel správný tlak, aby s ním efektivně zacházel, aby měkké uchopení . To je zajištěno ovládáním motorů ramene pomocí správného příkazu. Výstup z ramenových motorů je připojen k rezistoru 10 Ohmů / 2 W a v době přetížení motoru nebo zablokovaného motoru je na rezistoru vyvíjeno vysoké napětí, které způsobuje logicky vysokou úroveň na výstupu optoizolátoru a přerušení pin mikrokontroléru připojený k výstupu optoizolátoru přes pnp tranzistor získá logicky nízký signál, který zastaví všechny ostatní operace chapadla.
Díky jednoduché RF komunikaci tedy můžeme vlastně ovládat pick and place robot.
Praktické aplikace robota Pick and Place:
- Obranné aplikace : Může být použit pro sledování a také k sebrání škodlivých předmětů, jako jsou bomby, a jejich bezpečnému rozptýlení.
- Průmyslové aplikace : Tyto roboty se používají ve výrobě k vyzvednutí požadovaných dílů a jejich umístění do správné polohy k dokončení upnutí stroje. Lze jej také použít k umístění předmětů na dopravníkový pás a k vyzvednutí vadných produktů z dopravního pásu.
- Lékařské aplikace : Tyto roboty lze použít v různých chirurgických operacích, jako jsou operace náhrady kloubů, ortopedické a interní chirurgické operace. Provádí operace s větší přesností a přesností.
Kromě těchto aplikací lze tyto roboty použít také v různých jiných aplikacích vhodných pro lidstvo.
Otázkou nyní zůstává - Jak daleko je den, kdy roboti úplně usnadní lidem cestu?